¶ 手眼标定
当用户需确定机器人和相机的位置关系时,手眼标定模式为用户提供了三种不同的功能选择,分别为眼在手上标定、眼在手外标定及TCP针尖指点式标定。
| 显示选项 | 功能 | 用途描述 |
|---|---|---|
| 眼在手上标定 | 设备安装于机器人上的标定 | 确定设备相机坐标系和机器人工具坐标系的变换关系 |
| 眼在手外标定 | 设备未安装在机器人上单独固定放置的标定 | 确定设备相机坐标系和机器人基坐标系的变换关系 |
| 眼在手外TCP针尖指点触碰标定 | 利用机器人工具坐标系原点指向标定板编码点的位姿数据进行标定 | 确定设备相机坐标系和机器人基坐标系的变换关系 |
眼在手上与眼在手外标定的界面显示及使用方式相同,不同之处在于采集图像的形式。其中,眼在手上标定应用于设备安装在机器人上的条件,标定板固定放置,使用示教器移动机器人采集多张标定板图像进行标定。眼在手外标定应用于设备未安装在机器人上,单独固定放置的条件。需将标定板安装在机器人上,使用示教器移动机器人采集多张标定板图像进行标定。下面将以眼在手上标定进行介绍。
¶ 引导页说明
1、打开ALSON Viewer软件,在工具条中点击“手眼标定”按钮,进入手眼标定的引导界面。

2、以“眼在手上”为例,选中快速标定,点击“下一步”。

如果是选择“眼在手外TCP针尖触碰”,就没有“机器人角度类型”引导页。其他页面都是相同的。

3、基准尺的填写,可以参照精度校验中的基准尺说明。然后点击“下一步”。

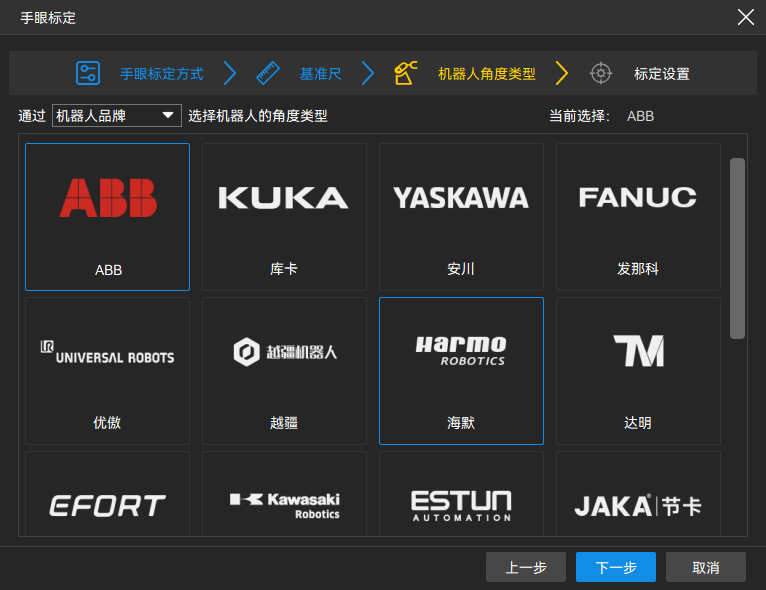
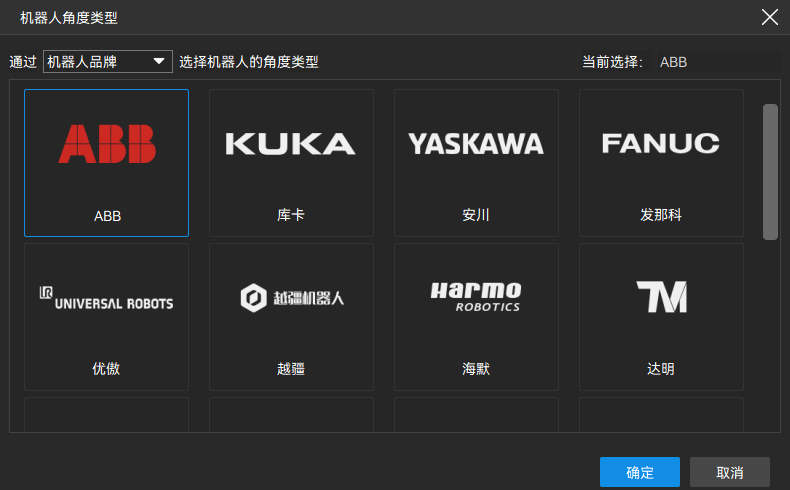
4、在“机器人角度类型”页面,包含几十种主流的机器人品牌,选择对应的机器人品牌,点击“下一步”。
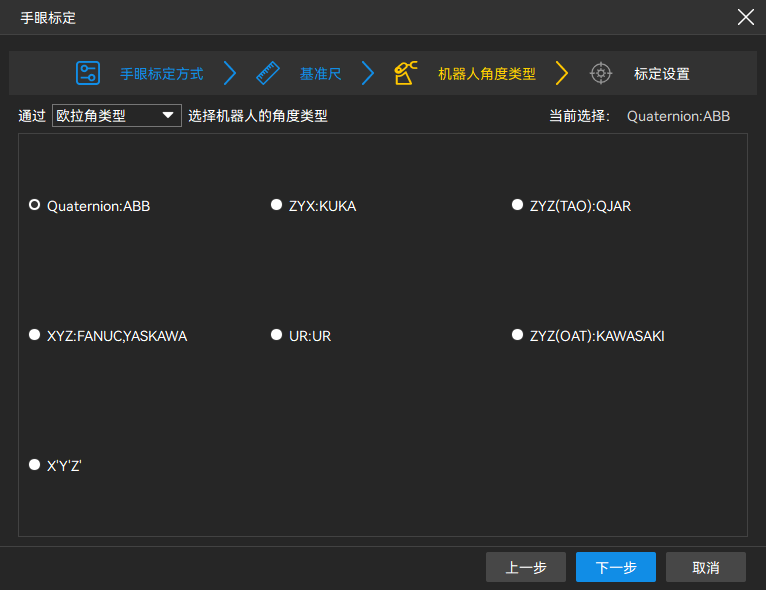
也可以通过选择“欧拉角类型”,确定机器人的角度。选择完成后,点击“下一步”。
5、标定数据文件夹名称 保存标定数据路径的最后一级目录的名称,用户可以自定义。主要用于存放标定过程中产生的数据。
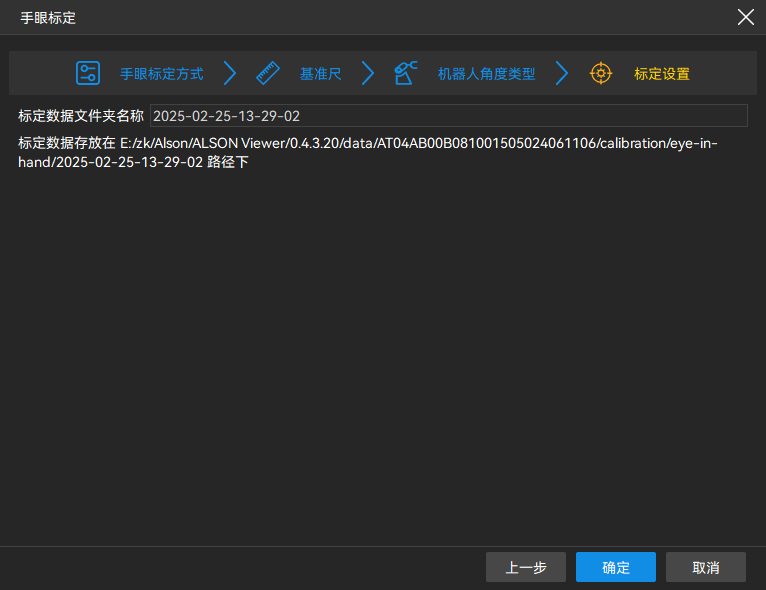
6、至此,手眼标定的引导完成,点击“确定”进入标定界面。
¶ 眼在手上标定
¶ 标定前准备工作
1.将相机连接板安装到机器人末端法兰上,再将相机安装到连接板上,确保相机安装稳固。
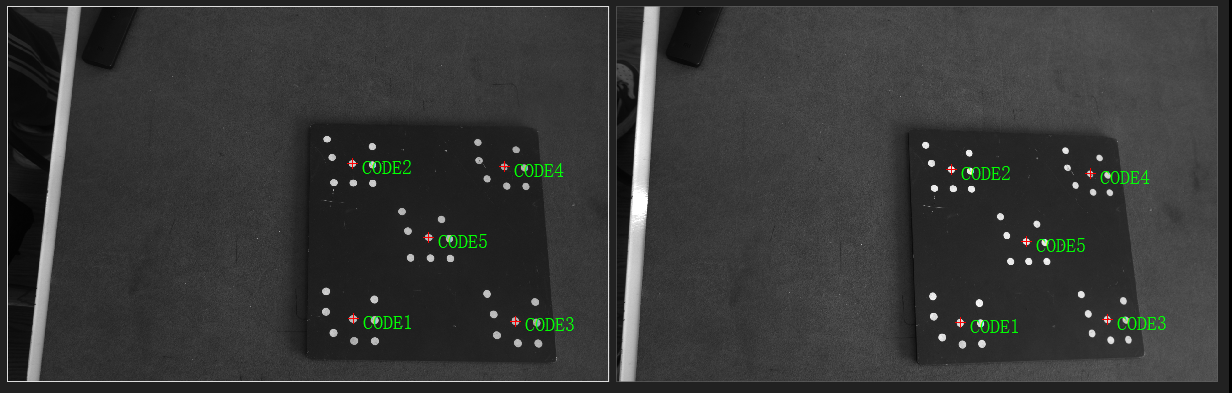
2.在标定之前,请检查标定板上圆是否清晰,有无明显刮花痕迹,标定板是否存在明显弯曲变形,标定板的基准尺是否清晰可见。
3.确认机器人绝对精度满足使用要求。
4.相机要先做一次精度校验,保证相机的精度满足要求。
5.将标定放置在相机的视野内,调整2D参数中的曝光,保证每组编码点的中心点都能被识别到。
¶ 标定流程
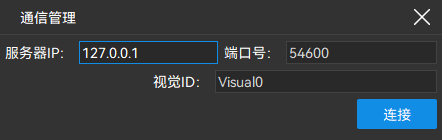
1、自动获取机器人的位姿,需要点击“通信管理”,连接转发服务器。

2、输入转发服务器的IP地址、端口号、视觉ID,点击“连接”按钮。具体转发服务器配置,参考ALSON TransServer
3、“通信管理”配置好之后,就点击“采集图像”。如果没有配置“通信管理”,也可以直接点击“采集图像”。手动输入机器人的位姿。
无论是配置“通信管理”,自动获取机器人的位姿还是手动输入机器人的位姿,都是要采集机器人的当前位姿下的图像。
建议配置“通信管理”,获取机器人位姿比较方便,可以提高手眼标定的速度。
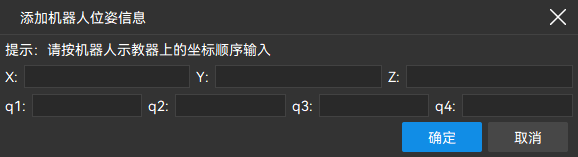
选择机器人品牌是ABB或者欧拉角类型是四元数,手输机器人位姿的界面如下图
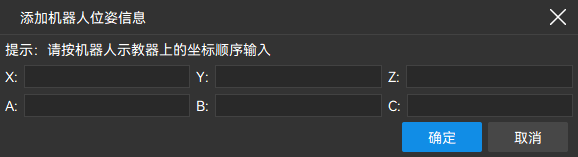
选择机器人是ABB之外的其他品牌或者欧拉角类型是欧拉角,手输机器人位姿的界面如下图
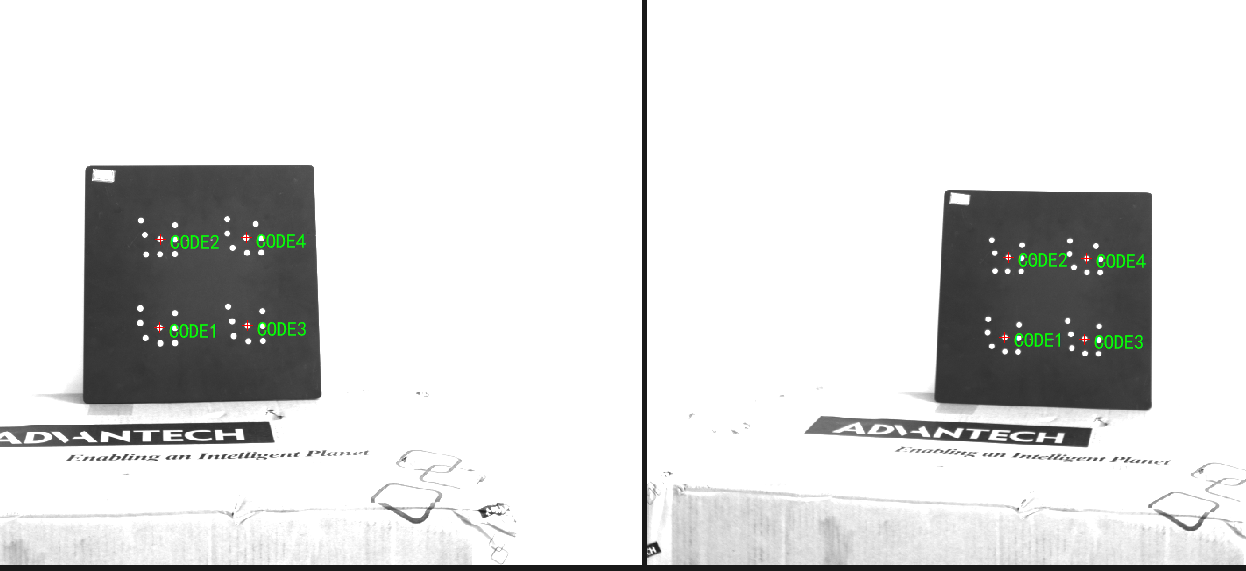
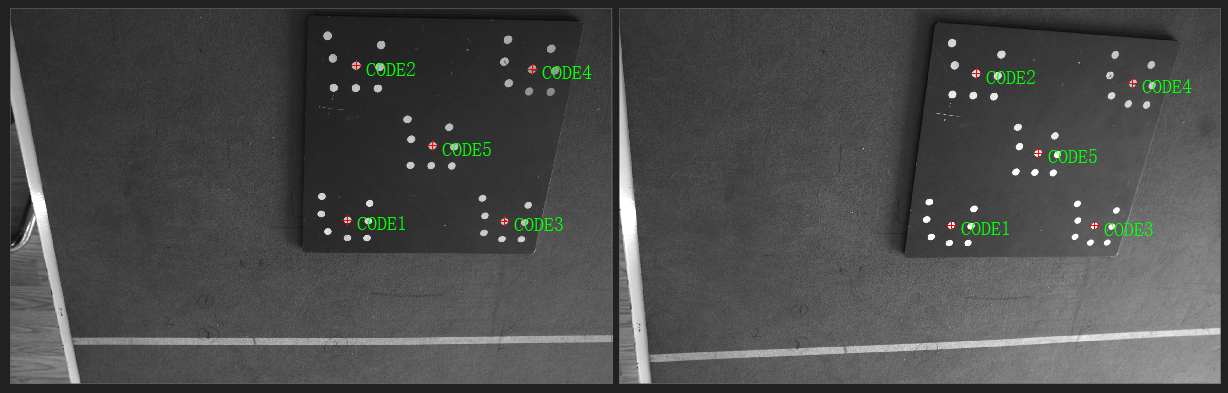
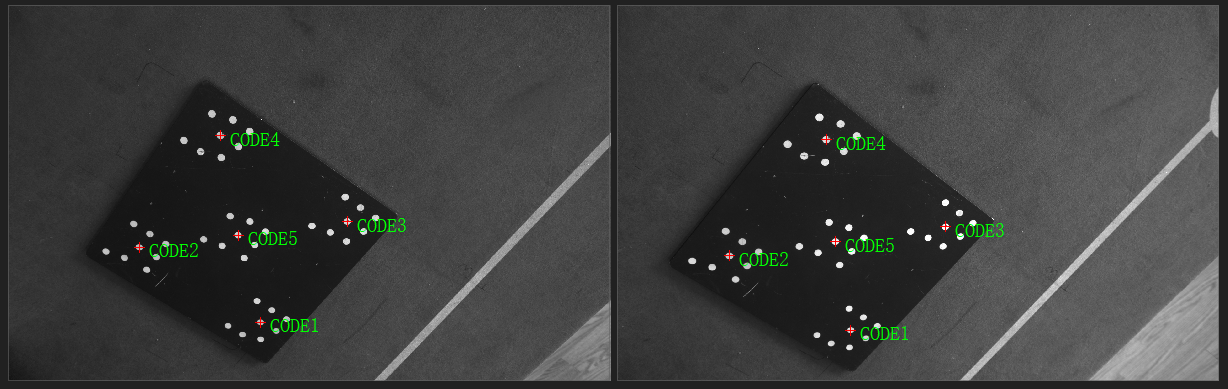
采集图像是,要采集15~20次数据,每次采集数据时,用户在明显改变机器人位置的同时,需保证机器人的姿态变化尽可能大于15°;
机器人在不同姿态下采集图像数据参考下方图例





4、采集的图像可以在“采集信息”的列表中查看,双击其中一行数据,可以查看该行图像信息。点击“进入实时”,就会退出查看,显示相机实时的图像。

操作小技巧
1.选中一行数据,然后点击鼠标右键,就会弹出“删除”按钮,点击“删除”,就会把这组数据删掉。
2.在眼在手上标定过程中,如果遇到问题,可以在“日志信息”中查看。


5、图像采集完成之后,点击“开始标定”按钮。弹出标定结果,就说明标定成功。
6、在进入标定界面或者标定完成对结果不满意,还想要切换机器人品牌或者角度类型,可以点击“机器人品牌:库卡”。

7、可以重新选择机器人的品牌、角度类型。
如果初始的机器人品牌是ABB,需要切换成其他品牌,采集的图像数据会被清空。其他品牌切换成ABB,采集的图像数据也会被清空。
如果初始的机器人角度类型是四元数,切换成其他类型,采集的图像数据会被清空。反之亦然。
8、标定完成后,点击“退出标定”,就可以退出标定界面。
操作小技巧
1.标定结果的均方根误差(RMSE)越小,其精度越高。2.标定失败的话,会在弹框提示。去“日志信息”排查问题。
3.加载离线数据 点击“加载离线数据”将之前采集的数据重新加载到软件,可以重新进行标定,也可以再采集一些新的图像,进行标定。
¶ 眼在手外标定
¶ 标定前准备工作
1.将相机安装在一个支架上,确保相机及相机支架稳固,连接板安装到机器人末端法兰上,再将标定板安装到连接板上,确保标定板安装稳固。
2.在标定之前,请检查标定板上圆是否清晰,有无明显刮花痕迹,标定板是否存在明显弯曲变形,标定板的基准尺是否清晰可见。
3.确认机器人绝对精度满足使用要求。
4.相机要先做一次精度校验,保证相机的精度满足要求。
5.将标定放置在相机的视野内,调整2D参数中的曝光,保证每组编码点的中心点都能被识别到。
¶ 标定流程
眼在手外标定流程参考眼在手上标定的流程。
¶ 眼在手外TCP针尖指点触碰标定
¶ 标定前准备工作
1.将相机安装在一个支架上,确保相机及相机支架稳固,连接板安装到机器人末端法兰上,再将标定板安装到连接板上,确保标定板安装稳固。
2.在标定之前,请检查标定板上圆是否清晰,有无明显刮花痕迹,标定板是否存在明显弯曲变形,标定板的基准尺是否清晰可见。
3.确认机器人绝对精度满足使用要求。
4.相机要先做一次精度校验,保证相机的精度满足要求。
5.将标定放置在相机的视野内,调整2D参数中的曝光,保证每组编码点的中心点都能被识别到。
¶ 标定流程
在眼在手外TCP针尖指点触碰标定有两种方式,第一种是勾选“All”选项,采集全部编码点。第二种是不勾选“All”,采集某一个编码点。

¶ 方式一:勾选“All”的标定流程
1、勾选“All”选项。

2、点击“获取编码点”,就可以算出每组编码点的中心点CamX、CamY、CamZ的值。在记录机器人位置前,标定板不能移动。

3、移动机器人,让机器人工具坐标系原点(针尖)分别对准各编码点中心位置,记录当前机器人位置坐标。
4、点击“开始标定”,获取标定结果。
5、标定完成后,点击“退出标定”,就可以退出标定界面。
¶ 方式二:不勾选“All”的标定流程
1、取消勾选“All”选项,设置“编码点”为1。

设置“编码点”的值时,不能超过标定板上实际编码块的数量。
2、点击“采集编码点”就可以算出每组编码点的中心点CamX、CamY、CamZ的值,然后移动机器人,让机器人工具坐标系原点(针尖)对准编码点中心位置,记录当前机器人位置坐标。

3、然后移动并旋转标定板(始终处于相机视野内),重复第2步操作,采集5-6组数据。
4、点击“开始标定”,获取标定结果。
操作小技巧
1.标定结果的均方根误差(RMSE)越小,其精度越高。2.标定失败的话,会在弹框提示。去“日志信息”排查问题。
3.加载离线数据 点击“加载离线数据”将之前采集的数据重新加载到软件,可以重新进行标定,也可以再采集一些新的图像,进行标定。
¶ 手眼标定注意事项
标定前准备工作一定要完成。