¶ 采集数据
相机连接成功后进入以下界面,在此界面可采集、查看和保存数据。
如下图所示:
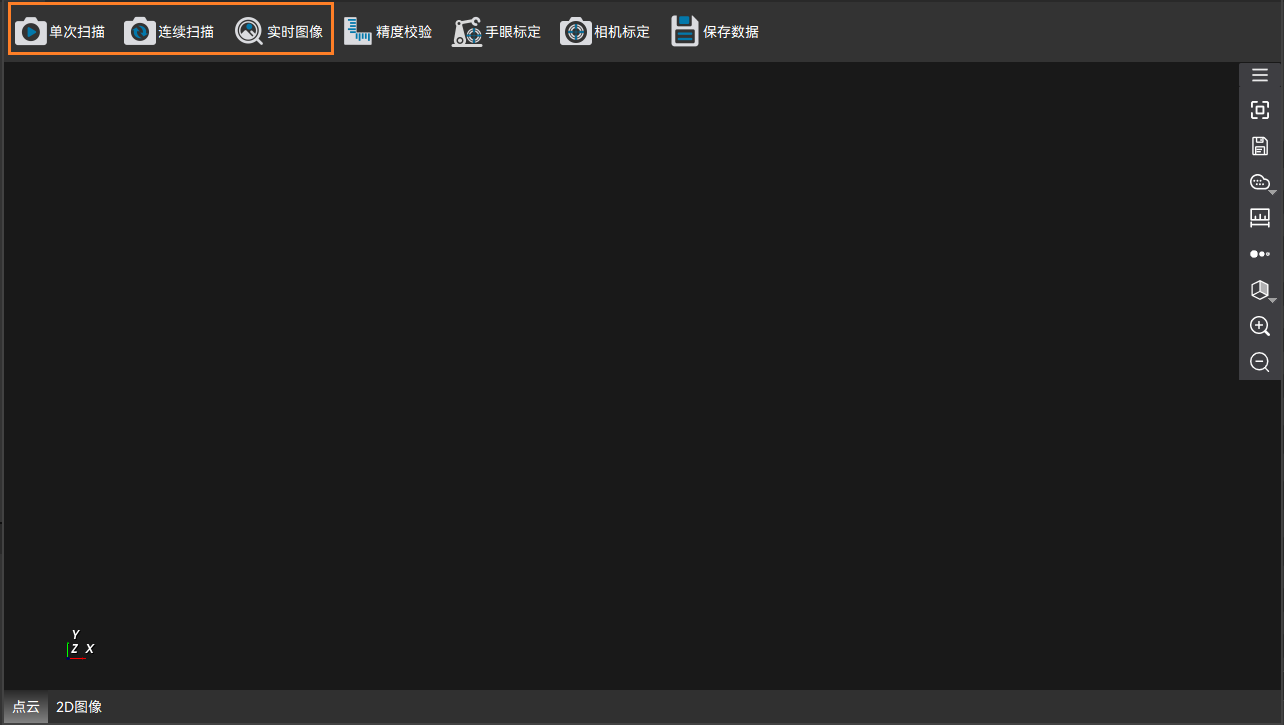
采集操作类型:
| 显示选项 | 功能 | 用途描述 |
|---|---|---|
| 单次扫描 | 扫描一次图像 | 按照预先设定的参数组完成单次数据采集,包含点云和2D图像 |
| 连续扫描 | 连续扫描图像 | 按照预先设定的参数组连续进行数据采集,包含点云和2D图像 |
| 实时图像 | 实时采集2D图像 | 快速显示图像,协助修改2D参数,仅包含2D图像 |
埃尔森设备采集的数据分为3D点云和2D图像,其介绍如下:
1)3D点云:包含工件表面特性的三维点集;
2)2D图像:我司设备左相机采集的2D图像又称纹理图像,3D点云的每个数据点都通过像素坐标系(u-v坐标)索引的方式在纹理图像内找到对应映射像素点。
3)针对A、C系列设备,目前2D图像可进行2D图像分割,以此协助点云分割;
4)针对C系列设备,2D图像还可协助改善3D点云生成质量。
¶ 单次扫描
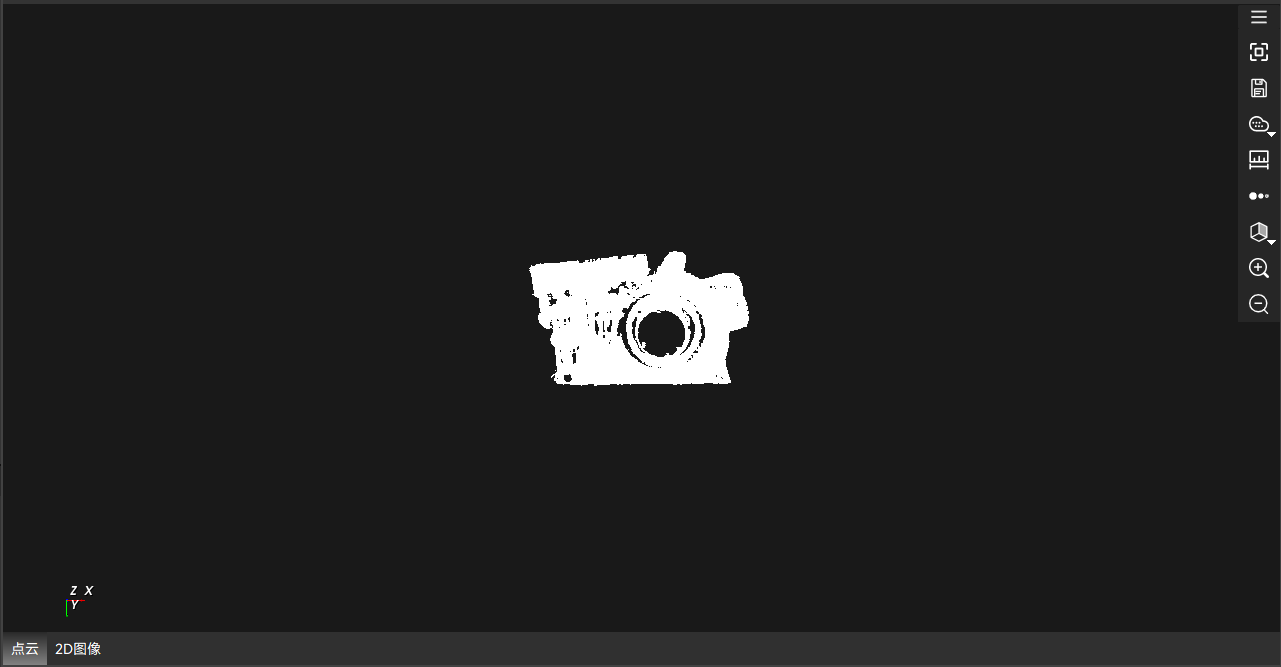
设备连接后,点击单次扫描可进行一次扫描工作,用户可获取一组3D点云和一组2D图像,
点云:
2D图像:

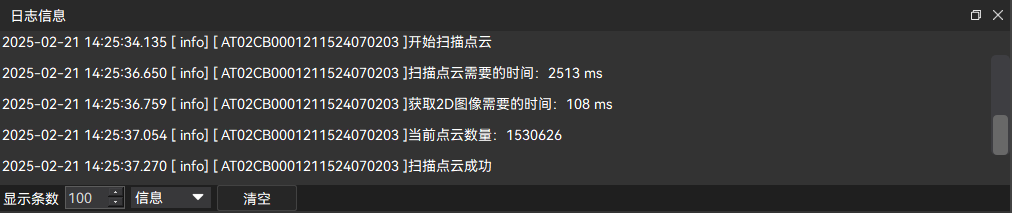
采集完成后,日志区会提示点云扫描成功,并给出扫描点云所需时间和当前点云数量。
如下图所示:
¶ 连续扫描
设备连接后,点击连续扫描可进入连续扫描工作模式,在进行连续扫描前,用户可根据需求决定是否在设置窗口中设定扫描时间间隔。
设置窗口如下图所示:

连续扫描开启后,工具栏内其它按钮将置灰不可点击,参数不可修改,用户需点击停止扫描后才可执行其他选择。
如下图所示:

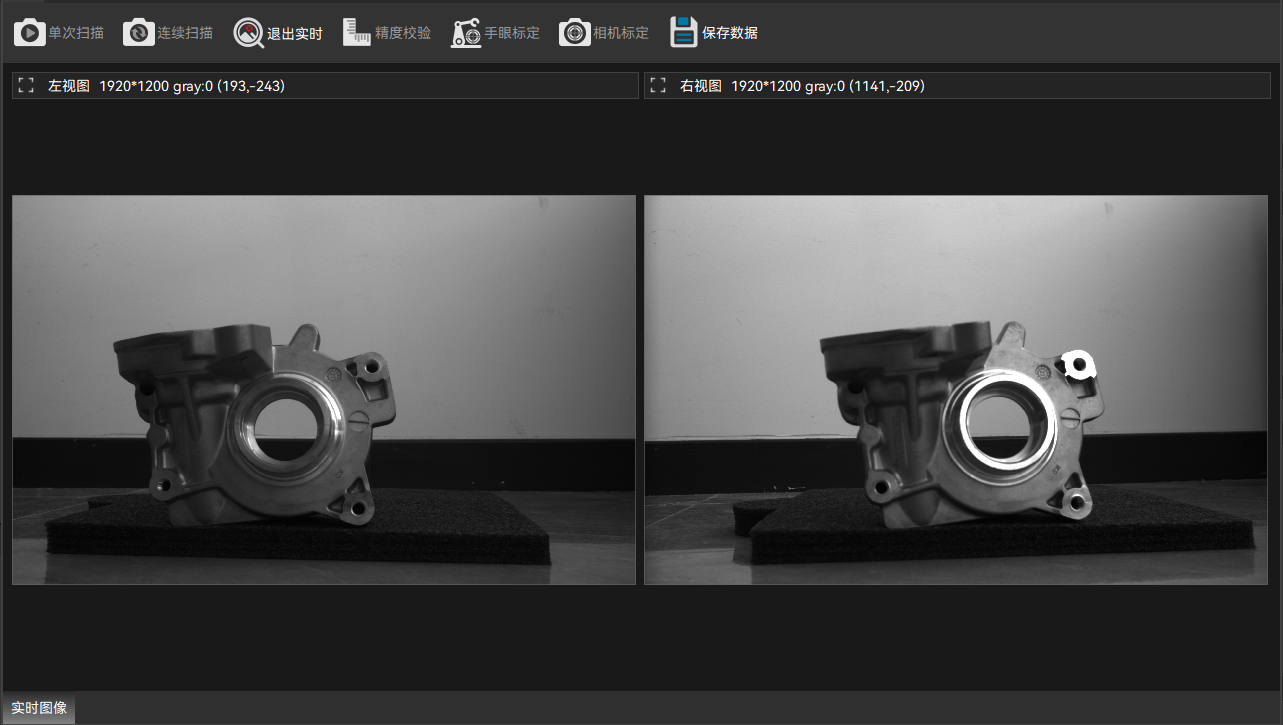
¶ 实时图像
设备连接后,点击实时图像可进入实时图像工作模式,用户可通过修改2D参数内的曝光时间、增益等参数查看2D图像的质量变化,以便保证采集到合适亮度的2D图像。
¶ 保存数据
如果用户想保存采集的点云数据,在扫描结束后,可点击保存数据,将点云、2D图像保存至指定路径下,保存路径会显示在日志区内,点击可跳转到对应目录。

如果用户想保存当前的实时图像数据,可在不退出实时图像模式的条件下点击保存数据,将实时2D图像保存至指定路径下,保存路径会显示在日志区内,点击可跳转到对应目录。
¶ 数据类型说明
| 数据类型 | 说明 | 对应文件名称 |
|---|---|---|
| 点云 | 点云控件中显示的点云数据 | originPointCloud |
| 原始图像 | 2D图像中显示左相机和右相机图像 | original_1、original_2 |
| 深度图像 | 深度图 | depth |
| 激光线融合图像 | 激光线融合图像,分四块区域, 仅A系列设备有该数据 | laser1、laser2、laser3、laser4 |
| 纹理图像 | 左相机图像 | texture |
| 立体矫正图像 | 矫正后的纹理图像 | StereoscopicCorrection |
保存的数据如下图目录中所示:

在设置窗口
保存的点云和图像设置说明
| 配置名称 | 说明 |
|---|---|
| 点云有序 | 勾选后采集和保存的点云为对齐后的点云,不勾选则是原始点云 |
| 原始图像 | 勾选后保存数据时,保存相机采集到的左右相机的图像 |
| 深度图像 | 勾选后保存数据时,保存深度图像 |
| 激光线融合图像 | 勾选后保存数据时,保存激光线融合图像 |
| 纹理图像 | 勾选后保存数据时,保存纹理图像 |
| 立体矫正图像 | 勾选后保存数据时,保存矫正后的纹理图像 |