¶ 参数说明
ALSON Viewer 的参数组内包含功能丰富的各类参数,下面分别介绍 A、C 系列设备参数并给出具体说明和调节注意事项。
¶ A系列参数简介
本小节将为用户简要介绍 A 系列设备参数及作用。
¶ 2D参数
用户在采集 2D 图像时,可先根据需求设定对应的 2D 参数。A 系列设备 2D 参数如下:
- 图像宽度 当前图像的像素宽度。
- 图像高度 当前图像的像素高度。
- 曝光模式::IMMUTABLE 固定曝光模式。
- 曝光模式::AUTO 自动曝光模式。
- 曝光模式::HDR 高动态范围融合模式。
- 打光模式 可控制补光灯的开启和关闭。
- 曝光时间 设定采集 2D 图像的相机曝光时间。
- 增益 改变图像的亮度。
- 曝光时间范围 限制可调整的曝光时间范围。
- 灰度值范围 限制可调整的灰度值范围。
- HDR阈值 影响融合后的图像质量。
- Gamma 改变图像的亮度。
- 动态范围 参与HDR融合的图像数量上限。
- 左/右相机ROI 在图像上框选出感兴趣区域。
- 最大迭代次数 自动曝光次数上限。
- 迭代超时时间 自动曝光耗时上限。
¶ 3D参数
用户在采集点云时,可先根据需求设定对应的 3D 参数。A 系列设备 3D 参数如下:
- 曝光时间 采集 3D 点云时曝光时间。
- 增益 采集 3D 点云时增益。
- 转动速度 激光器电机的转动速度。
- 触发频率 硬件触发相机的频率。
- 左/右角度 激光器电机左、右半平面扫描角度。
- 激光阈值 设定带激光线图像的分割阈值。
- 激光宽度 设定光条中心线提取所需宽度。
- 激光线提取模式 更改激光线提取方法。
- 点云平滑强度 更改点云平滑强度。
- 左/右相机ROI 划定点云采集区域。
- 深度测量范围 设定重建 3D 点云的深度区间。
¶ 调试参数
用户在调试点云效果时,可设置对应的调试参数查看原始激光线数据。A 系列设备调试参数如下:
¶ 相机参数
用户在不同的工控机上使用设备时,不同的性能 2D 相机参数也需要对应调整,相机参数如下:
¶ C系列参数简介
本小节将为用户简要介绍 C 系列设备参数及作用。
¶ 2D参数
用户在采集 2D 图像时,可先根据需求设定对应的 2D 参数。C 系列设备 2D 参数如下:
- 图像宽度 当前图像的像素宽度。
- 图像高度 当前图像的像素高度。
- 曝光模式::IMMUTABLE 固定曝光模式。
- 曝光模式::AUTO 自动曝光模式。
- 曝光模式::FLASH 补光模式。
- 曝光模式::IN_SCAN 扫描时采图模式。
- 曝光模式::IN_SCAN_HDR 扫描时采图融合模式。
- 曝光时间 设定采集 2D 图像的相机曝光时间。
- 曝光时间索引 IN_SCAN 模式下某组 3D 曝光时间的索引,采集索引值对应的 3D 曝光时间下光机补光后的 2D 图像。
- 增益 改变图像的亮度。
- Gamma 改变图像的亮度。
- 快速HDR 只返回一张HDR融合图像。
- 曝光时间范围 限制可调整的曝光时间范围。
- 灰度值范围 限制可调整的灰度值范围。
- 最大迭代次数 自动曝光次数上限。
- 迭代超时时间 自动曝光耗时上限。
¶ ROI参数
用户在采集 2D 图像时,如果遇到图像部分区域存在过曝光或者欠曝光的情况,可根据需求设定对应的 ROI 参数调节图像质量。C 系列设备 ROI 参数如下:
¶ 3D参数
用户在采集点云时,可先根据需求设定对应的 3D 参数。C 系列设备 3D 参数如下:
- 曝光时间 采集 3D 点云时曝光时间。
- 增益 采集 3D 点云时增益。
- 光机亮度 调节光机的投射光强。
- 增强模式 降低点云缺失。
- 点云去噪 去除噪声点。
- 孔洞填充 填充点云中存在的细小孔洞。
- 滤波模式 对点云进行预处理,使点云平滑。
- 边缘保护 在物体边缘处尽可能多的保留点云。
- 解码阈值 设定光栅条纹图成像后亮暗对比差异。
- 深度测量范围 设定重建3D点云的深度区间。
¶ 相机参数
用户在不同的工控机上使用设备时,不同的性能2D相机参数也需要对应调整,相机参数如下:
¶ 光机控制参数
用户在不同的现场有不同的节拍需求,可以根据实际情况调整光机控制参数,光机控制参数如下:
¶ 参数详情
本小节将为用户详细介绍 A、C 系列设备每个参数的作用、效果以及调节注意事项。
¶ 2D参数: 图像宽度
- 参数说明 : 当前图像的像素宽度。
- 参数索引 : 2dParameters.width
- 可见级别 : 专家、大师
- 调节说明 : A 系列非嵌入式可以修改该参数,其余不可修改。
适当减小图像宽度,减小相机视野,增加帧率,减小外部环境干扰,减小扫描节拍。
¶ 2D参数: 图像高度
- 参数说明 : 当前图像的像素高度。
- 参数索引 : 2dParameters.height
- 可见级别 : 专家、大师
- 调节说明 : A系列非嵌入式可以修改该参数,其余不可修改。
适当减小图像高度,减小相机视野,增加帧率,减小外部环境干扰,减小扫描节拍。
¶ 2D参数: 曝光模式::IMMUTABLE
- 参数说明 : 固定曝光模式,采图时曝光时间不会发生变动。
- 参数索引 : 2dParameters.exposureMode
- 可见级别 : 专家、大师
- 调节说明 : 此模式下用户在采集 2D 图像时可以通过设置打光模式、曝光时间、增益以及 Gamma 改变图像质量。
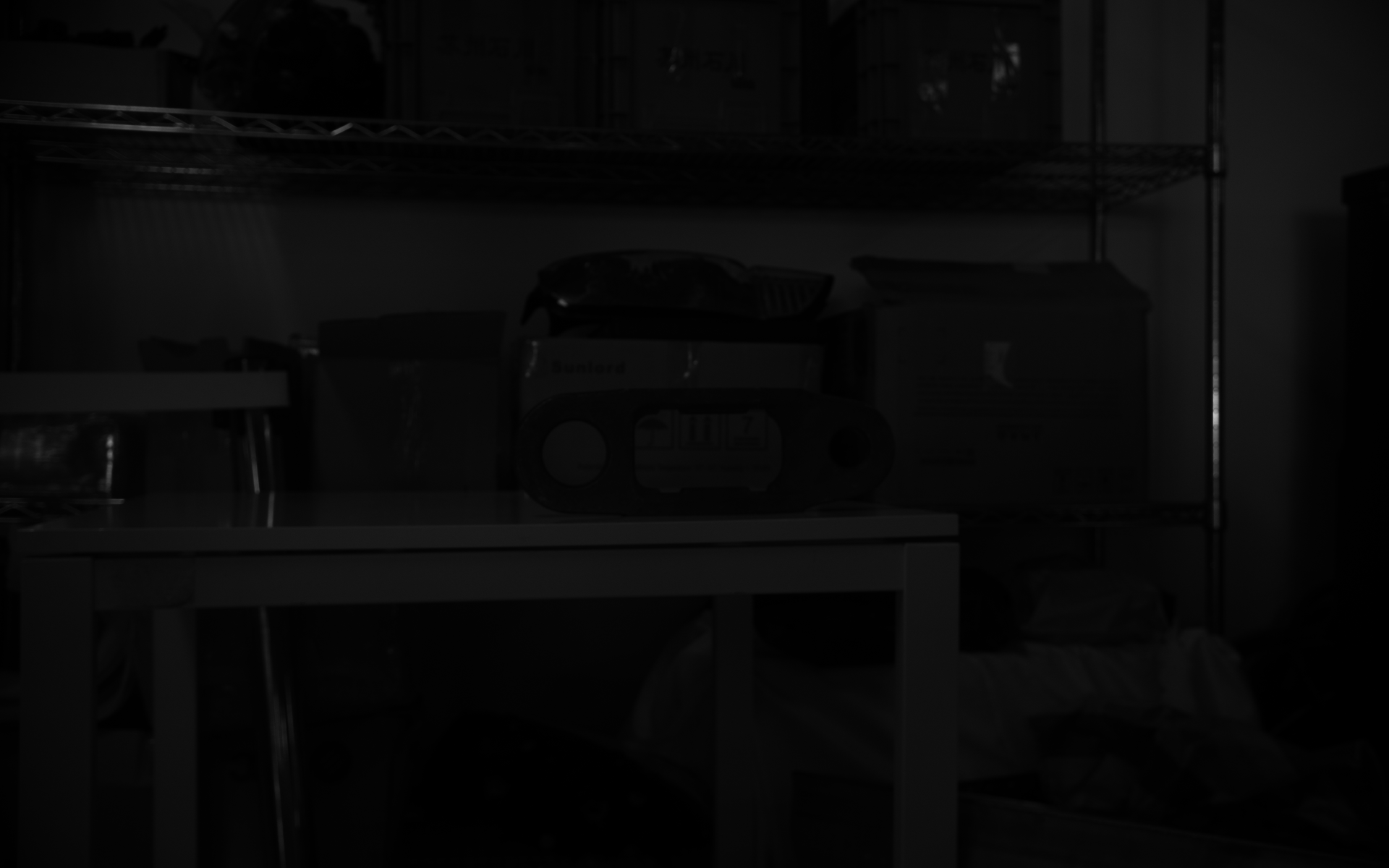
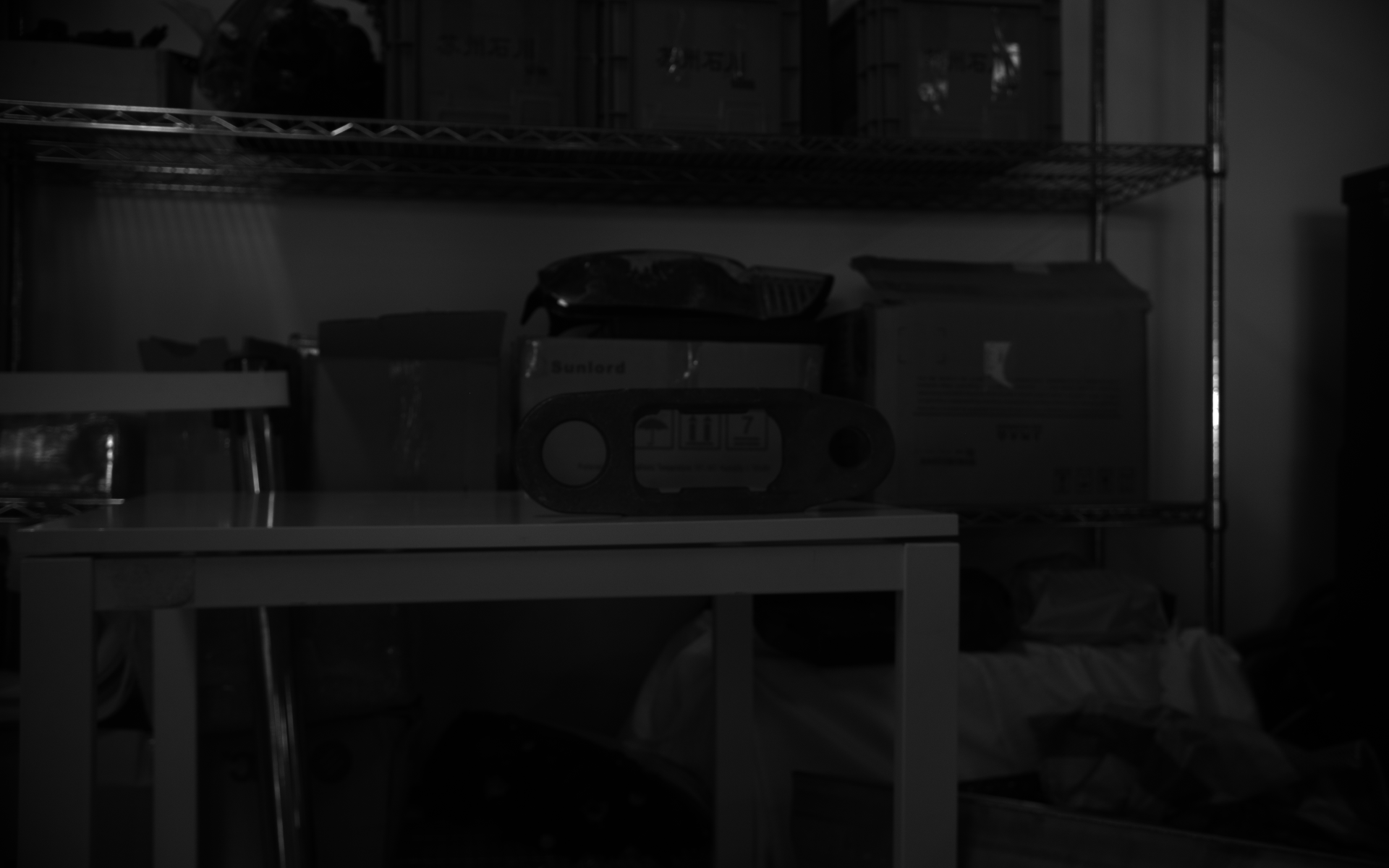
其他条件不变,仅2D曝光时间不同的2D图像对比如下:
| 100ms | 500ms |
|---|---|
 |
 |
如果场景亮度均匀,用户可将 2D 参数分组中的曝光模式设置为 IMMUTABLE,然后调节 2D 参数下的曝光时间和增益。
¶ 2D参数: 曝光模式::AUTO
- 参数说明 : 自动曝光模式,采图时曝光时间会根据用户设定参数而自动调节。
- 参数索引 : 2dParameters.exposureMode
- 可见级别 : 专家、大师
- 调节说明 : 如果场景存在局部过亮或过暗区域,用户可将 2D 参数分组中的曝光模式设置为 AUTO,然后调节曝光时间范围、灰度值范围上下限,增益,左/右相机 ROI,最大迭代次数和迭代超时时间。
其他条件不变,调整灰度值范围自动曝光模式采集的 2D 图像效果图下:
| 灰度值范围 30-60 | 灰度值范围 100-225 |
|---|---|
 |
 |
若场景内存在亮度分布不均匀或存在大量过曝区域,可通过框选至多5组 ROI 来对图像质量进行调节。
¶ 2D参数: 曝光模式::HDR
- 参数说明 : 高动态范围融合模式,采图时曝光时间会根据用户设定参数而自动调节。
- 参数索引 : 2dParameters.exposureMode
- 可见级别 : 专家、大师
- 调节说明 : 如果场景位于户外高亮场景,或需要补光的暗场景下,用户可将2D参数分组中的曝光模式设置为"HDR",然后调节曝光时间范围,灰度值范围,增益,HDR 阈值,Gamma,动态范围,左/右相机 ROI,最大迭迭代次数和迭代超时时间。
其他条件不变,调整灰度值范围 HDR 模式采集的 2D 图像效果图下:
| 灰度值范围 30-60 | 灰度值范围 100-225 |
|---|---|
 |
 |
若场景内存在亮度分布不均匀或存在大量过曝区域,可通过框选至多5组 ROI 来对图像质量进行调节。
¶ 2D参数: 曝光模式::FLASH
- 参数说明 : 适用于需要对采集图像进行补光的场景,采集 2D 图像时会用光机打一次光进行补光。
- 参数索引 : 2dParameters.exposureMode
- 可见级别 : 专家、大师
- 调节说明 : 将曝光模式切换到“FLASH”,调整光机亮度参数以获取合适亮度的2D图像。
其他条件不变,固定曝光模式和自动曝光模式采集的 2D 图像效果图下:
| IMMUTABLE 模式 | FLASH 模式 |
|---|---|
 |
 |
光机打光后会提升图像灰度值,因此用户可选择适当降低曝光时间。进入实时模式后,光机会持续闪烁。
¶ 2D参数: 曝光模式::IN_SCAN
- 参数说明 : 扫描时采图模式,该模式采集的 2D 图像来源于 3D 点云扫描过程中对应曝光时间索引指向的一张图像,因此不额外耗费图像采集时间。
- 参数索引 : 2dParameters.exposureMode
- 可见级别 : 专家、大师
- 调节说明 : 将曝光模式切换到 “IN_SCAN”,设置曝光时间索引即可获取点云扫描过程中的打光图像。
其他条件不变,3D 曝光时间分别是10000、20000、30000,修改曝光时间索引 "IN_SCAN" 模式采集的 2D 图像效果图下:
| 曝光时间索引 1 | 曝光时间索引 2 | 曝光时间索引 3 |
|---|---|---|
 |
 |
 |
如果用户使用 "IN_SCAN" 模式获取的图像有部分过曝光或者欠曝光,可以使用 "IN_SCAN_HDR" 模式获取融合图像。
¶ 2D参数: 曝光模式::IN_SCAN_HDR
- 参数说明 : 该模式采集的 2D 图像来源于 3D 点云扫描过程中采集打光融合图像。
- 参数索引 : 2dParameters.exposureMode
- 可见级别 : 专家、大师
- 调节说明 : 将曝光模式切换到 “IN_SCAN_HDR”,该模式下快速 HDR 如果值为 True,则返回左相机 HDR 图像,如果为 False,则返回两张 HDR 图像。
其他条件不变,3D 曝光时间分别是10000、30000,修改曝光时间索引 "IN_SCAN" 模式和 "IN_SCAN_HDR" 模式采集的 2D 图像效果图下:
| 曝光时间索引 1 | 曝光时间索引 2 | 融合图像 |
|---|---|---|
|
 |
 |
¶ 2D参数: 打光模式
- 参数说明 : 部分安装补光灯的设备支持,开启后将起到为 2D 图像的补光作用。
- 参数索引 : 2dParameters.flashMode
- 可见级别 : 专家、大师
- 调节说明 : 对于暗场景需要补光的环境可开启该模式。
其他条件不变,开启打光模式前后采集的 2D 图像效果图下:
| 打光前 | 打光后 |
|---|---|
 |
 |
¶ 2D参数: 2D曝光时间
- 参数说明 : 2D 参数下的曝光时间会对 2D 图像采集质量产生影响,和 3D 参数内曝光时间相互独立。
- 参数索引 : 2dParameters.exposureTime
- 可见级别 : 初级、专家、大师
- 调节说明 : 如果物体颜色较深或不易反光,用户可增加曝光时间;如果物体颜色较浅或反光,用户可降低曝光时间。
其他条件不变,仅 2D 曝光时间不同的 2D 图像对比如下:
| 100ms | 300ms | 500ms |
|---|---|---|
|
 |
|
¶ 2D参数: 曝光时间索引
- 参数说明 : IN_SCAN 模式下可用,选择3D参数组内的曝光时间对应索引,利用光机对固定曝光图像进行补光,采集补光图像。
- 参数索引 : 2dParameters.exposureTimeIndex
- 可见级别 : 初级、专家、大师
- 调节说明 : 设置 3D 参数内的增益、曝光时间和光机亮度,利用 2D 参数内的曝光时间索引选择对应的 3D 曝光时间采集 2D 图像。
¶ 2D参数: 2D增益
- 参数说明 : 2D 参数下的增益会对 2D 图像采集质量产生影响,和 3D 参数内增益相互独立。
- 参数索引 : 2dParameters.gain
- 可见级别 : 初级、专家、大师
- 调节说明 : 如果物体颜色较深或不易反光,用户可增加增益;如果物体颜色较浅或反光,用户可降低增益。
其他条件不变,仅 2D 增益不同的 2D 图像对比如下:
| 1db | 10db | 15db |
|---|---|---|
 |
 |
 |
¶ 2D参数: 曝光时间范围
- 参数说明 : 设定一个曝光时间可变化的范围,AUTO 和 HDR 模式下使用。
- 参数索引 : 2dParameters.exposureTimeRange
- 可见级别 : 专家、大师
- 调节说明 : 如果场景存在局部过亮或过暗区域,用户可将 2D 参数分组中的曝光模式设置为 "AUTO",然后调节曝光时间范围、灰度值范围上下限,增益,左/右相机 ROI,最大迭代次数和迭代超时时间。
¶ 2D参数: 灰度值范围
- 参数说明 : 设定一个图像灰度值的范围,"AUTO" 和 "HDR" 模式下使用。
- 参数索引 : 2dParameters.grayValueRange
- 可见级别 : 专家、大师
- 调节说明 : 如果场景存在局部过亮或过暗区域,用户可将 2D 参数分组中的曝光模式设置为 "AUTO",然后调节曝光时间范围、灰度值范围上下限,增益,左/右相机 ROI,最大迭代次数和迭代超时时间。
¶ 2D参数: HDR阈值
- 参数说明 : "HDR" 模式下可用,影响 HDR 融合后的图像质量。
- 参数索引 : 2dParameters.hdrThreshold
- 可见级别 : 专家、大师
- 调节说明 : 阈值越小,结果越好,耗时越久。
¶ 2D参数: Gamma
- 参数说明 : 改变图像的整体亮度。
- 参数索引 : 2dParameters.gamma
- 可见级别 : 大师
- 调节说明 : 大于1时将图像压暗,小于1时将图像提亮。
¶ 2D参数: 快速HDR
- 参数说明 : "IN_SCAN_HDR" 模式可用,只获取一张融合图像。
- 参数索引 : 2dParameters.fastHdr
- 可见级别 : 大师
- 调节说明 : 不勾选返回左右相机融合图像,勾选则只返回左相机融合图像。
勾选快速 HDR 选项,只返回左相机融合图像,节省节拍。
¶ 2D参数: 动态范围
- 参数说明 : 在 "HDR" 模式下设定,动态范围指参与 HDR 融合的图像数量上限。
- 参数索引 : 2dParameters.maxDynamicRange
- 可见级别 : 大师
- 调节说明 : 参数值越大图像最终成像效果越好,耗时越久。
¶ 2D参数: 2D左/右相机ROI
- 参数说明 : 左右相机的 ROI(感兴趣区域)数组,由多个感兴趣区域组合。设定后,在 "AUTO" 模式和"HDR" 模式下图像整体质量仅取决于 ROI 内像素灰度变化。
- 参数索引 : 2dParameters.leftRoiArray / 2dParameters.rightRoiArray
- 可见级别 : 专家、大师
- 调节说明 : 对于存在部分区域过曝光或者欠曝光的图像,框选 ROI 融合以提升图像质量。
¶ 2D参数: 最大迭代次数
- 参数说明 : "AUTO" 和 "HDR" 模式下使用。
- 参数索引 : 2dParameters.maxIterationCount
- 可见级别 : 大师
- 调节说明 : 最大迭代次数指自动曝光次数,迭代次数越高,最终展示的图像灰度均值越接近灰度值上下限中值,耗时越长。
¶ 2D参数: 迭代超时时间
- 参数说明 : "AUTO" 和 "HDR" 模式下使用。
- 参数索引 : 2dParameters.iterationTimeout
- 可见级别 : 大师
- 调节说明 : 迭代超时时间指自动曝光的总耗时,当超过该时间,会终止自动曝光。迭代超时时间越高,最终展示的图像灰度均值越接近灰度值上下限中值,耗时越长。
¶ ROI参数: 左/右相机 2D ROI
- 参数说明 : 左右相机的 ROI(感兴趣区域)数组,由多个感兴趣区域组合。设定后,在 "AUTO" 模式下图像整体质量仅取决于 ROI 内像素灰度变化。
- 参数索引 : roiParameters.2dLeftRoiArray / roiParameters.2dRightRoiArray
- 可见级别 : 专家、大师
- 调节说明 : 对于存在部分区域过曝光或者欠曝光的图像,框选 ROI 融合以提升图像质量。
¶ 3D参数: 3D曝光时间
- 参数说明 : 3D 参数下的曝光时间会对点云采集质量产生影响,和 2D 参数内曝光时间相互独立。
- 参数索引 : 3dParameters.exposureTimeArray
- 可见级别 : 初级、专家、大师
- 调节说明 : 如果物体颜色较深或不易反光,用户可增加曝光时间;如果物体颜色较浅或反光,用户可降低曝光时间和增益;若设置多组曝光时间,则用户扫描点云时获得的是多曝光融合点云;如果单次曝光时间采集点云质量无法满足需求,用户可设置多组曝光生成融合点云的方式提升点云效果。
¶ 3D参数: 3D增益
- 参数说明 : 3D 参数下的增益会对点云采集质量产生影响,和 2D 参数内增益相互独立。
- 参数索引 : 3dParameters.gain
- 可见级别 : 初级、专家、大师
- 调节说明 : 如果物体颜色较深或不易反光,用户可增加增益;如果物体颜色较浅或反光,用户可降低增益。
图像噪声会随增益升高而增加。
¶ 3D参数: 光机亮度
- 参数说明 : 调节光机的投射光强。
- 参数索引 : 3dParameters.dlpLuminance
- 可见级别 : 专家、大师
- 调节说明 : 调节光机亮度光机亮度会使 2D 图像整体亮度发生变化,同时影响点云采集效果;用户在采集高亮反光物体的数据时可适当降低光机亮度,采集黑色不反光物体时的数据可适当提升光机亮度。
光机打光后会提升图像灰度值,因此用户可选择适当降低曝光时间。
¶ 3D参数: 增强模式
- 参数说明 : 现场只靠调试曝光时间、增益等依然点云缺失,开启增强模式可以降低点云缺失。
- 参数索引 : 3dParameters.enhanceMode
- 可见级别 : 大师
- 调节说明 : 开启该模式会降低点云缺失,但会导致噪声点云增加,根据实际情况开启。
其他条件不变,开启增强模式前后点云对比如下:
| 开启增强模式前 | 开启增强模式后 |
|---|---|
 |
 |
¶ 3D参数: 点云去噪
- 参数说明 : 去除噪声点。
- 参数索引 : 3dParameters.denoiseMode
- 可见级别 : 大师
- 调节说明 : 开启该模式会对采集的点云进行预处理,消除离群噪声点云。
其他条件不变,开启点云去噪前后点云对比如下:
| 点云去噪前 | 点云去噪后 |
|---|---|
 |
 |
¶ 3D参数: 孔洞填充
- 参数说明 : 该功能可填充点云中存在的细小孔洞,使点云更完整。
- 参数索引 : 3dParameters.holeFilling
- 可见级别 : 专家、大师
- 调节说明 : 通过设置参数值决定被填充孔洞的直径,填充后的点云位置可能和真实值存在一定偏差。
其他条件不变,不同的孔洞填充参数效果对比如下:
| 孔洞填充值为0 | 孔洞填充值为10 |
|---|---|
 |
 |
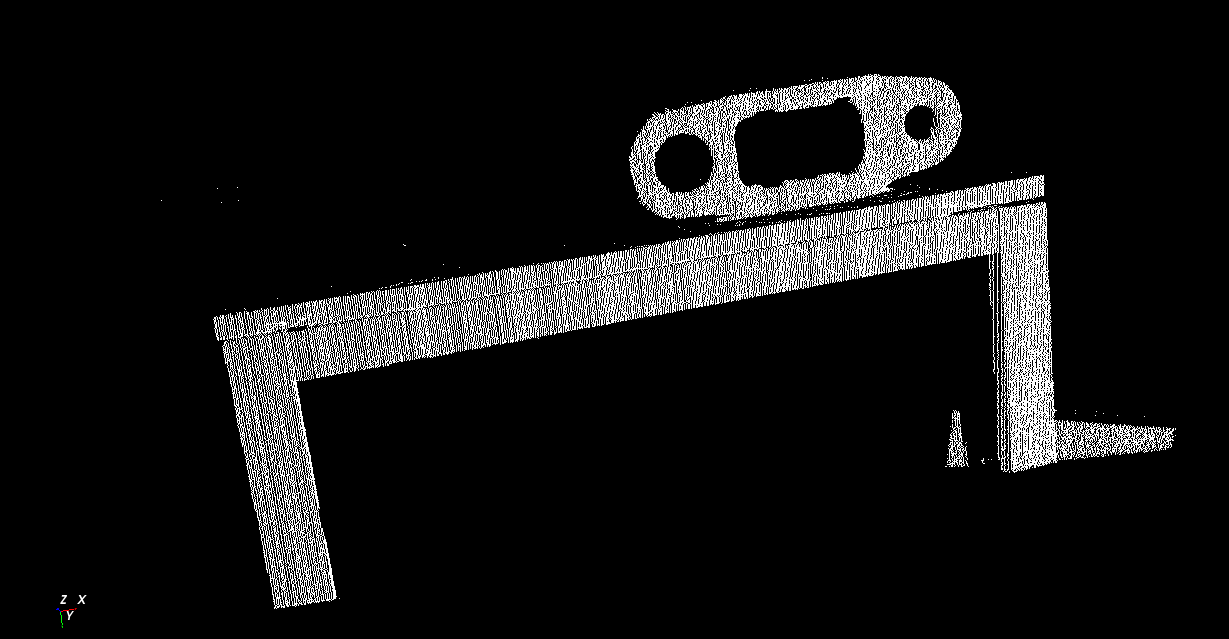
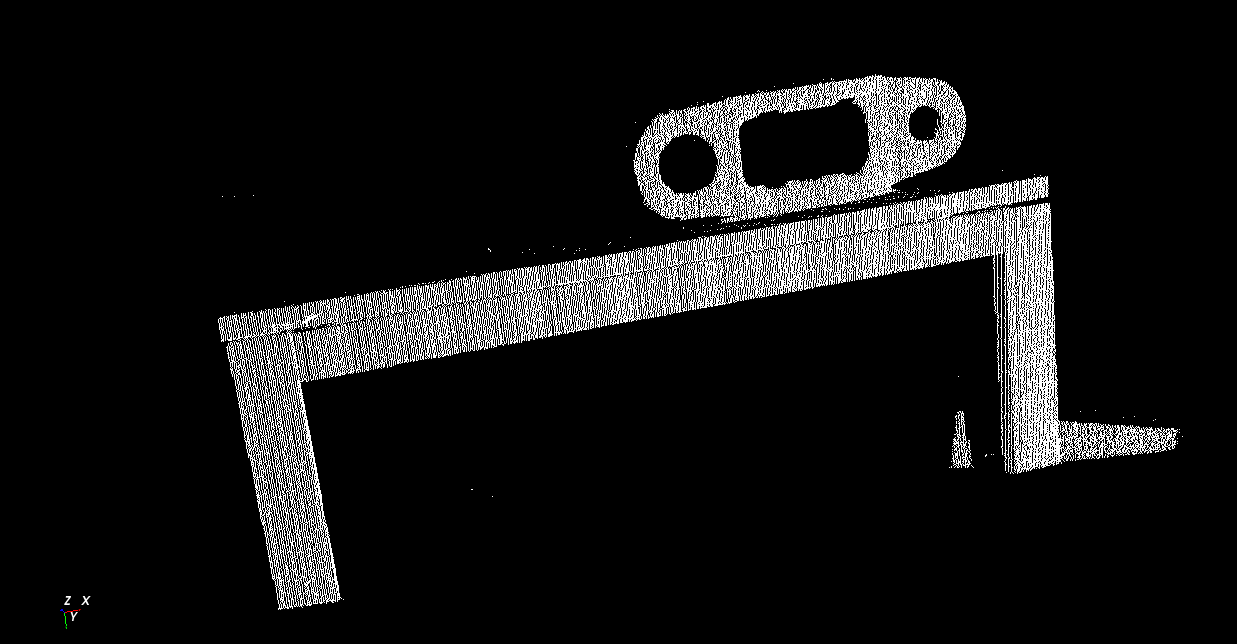
¶ 3D参数: 滤波模式
- 参数说明 : 对点云进行预处理,过滤掉部分噪声点云。
- 参数索引 : 3dParameters.filterMode
- 可见级别 : 大师
- 调节说明 : 该模式会对采集的点云进行预处理,开启前为 OFF,开启后可选择 LOW、MEDIUM、HIGH、EXTREMELY_HIGH 四个模式,对点云进行平滑处理。
其他条件不变,不同的滤波模式参数效果对比如下:
| 关闭滤波模式 | 滤波模式为极高 |
|---|---|
 |
 |
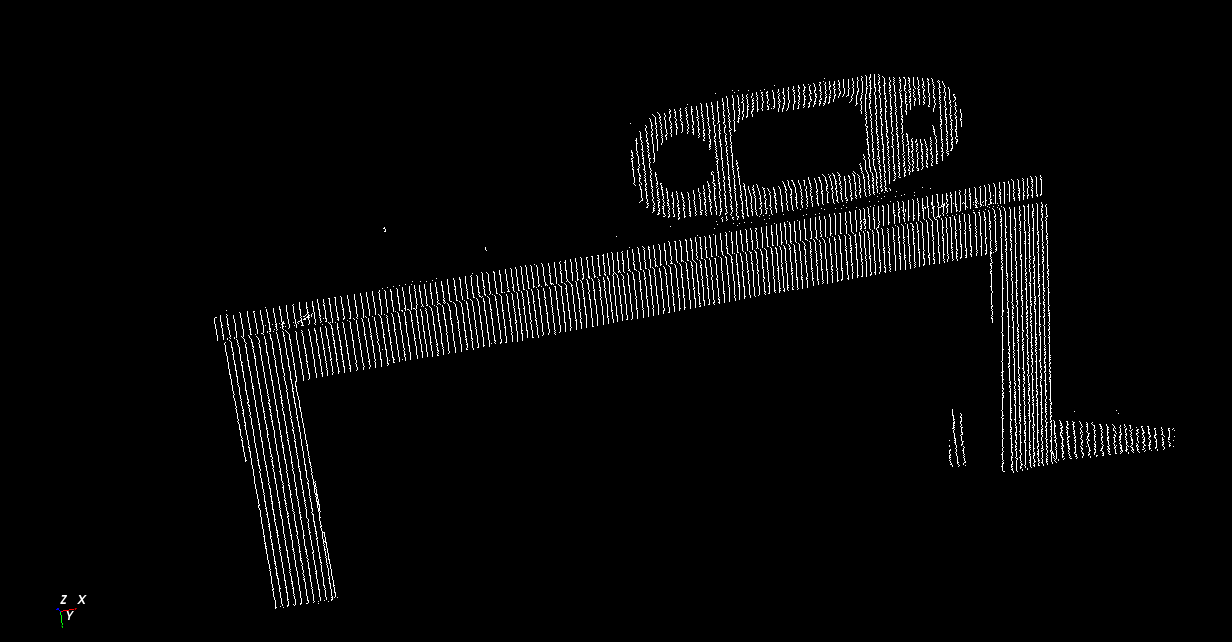
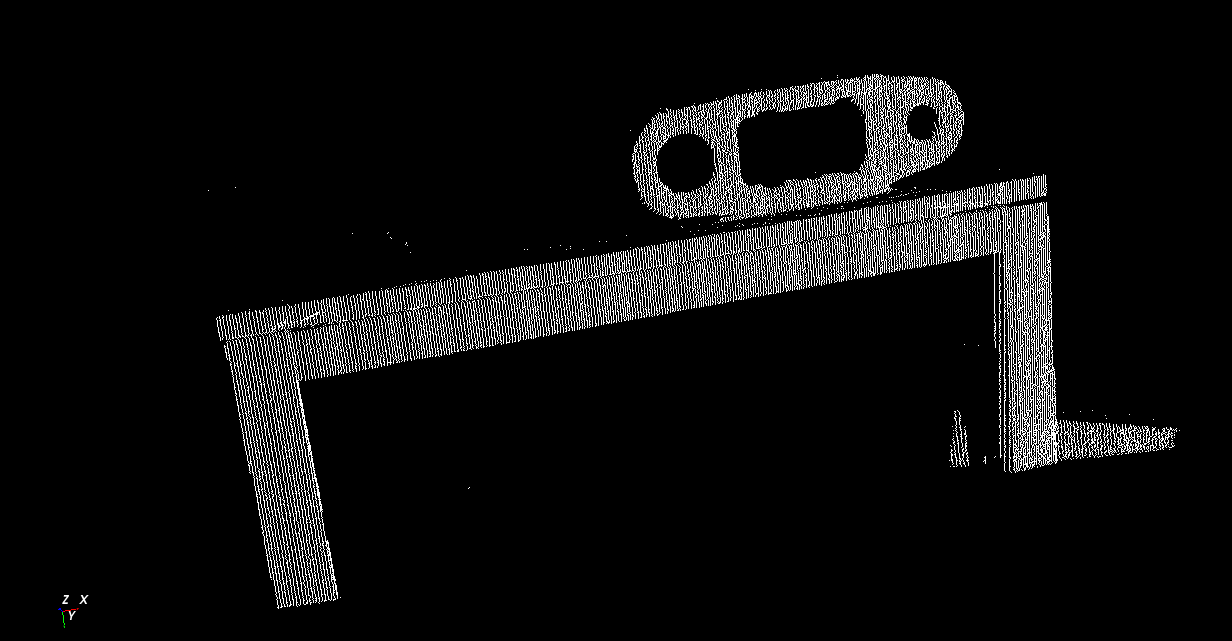
¶ 3D参数: 边缘保护
- 参数说明 : 在物体边缘处尽可能多的保留点云。
- 参数索引 : 3dParameters.edgeProtection
- 可见级别 : 大师
- 调节说明 : 开启该模式会在目标边缘位置生成更多的点。
其他条件不变,开启边缘保护前后点云效果对比如下:
| 开启边缘保护前 | 开启边缘保护后 |
|---|---|
 |
 |
¶ 3D参数: 解码阈值
- 参数说明 : 解码阈值主要用来设定光栅条纹图成像后亮暗对比差异。
- 参数索引 : 3dParameters.decodeThreshold
- 可见级别 : 专家、大师
- 调节说明 : 降低解码阈值,会提升对黑色物体的点云重建效果;提升解码阈值,会使重建点云产生少量异常点,降低黑色工件点云的采集精度。
其他条件不变,解码阈值不同参数设置效果对比如下:
| 解码阈值 8 | 解码阈值 16 | 解码阈值 32 |
|---|---|---|
 |
 |
 |
¶ 3D参数: 转动速度
- 参数说明 : 激光器电机的转动速度。
- 参数索引 : 3dParameters.turnSpeed
- 可见级别 : 初级、专家、大师
- 调节说明 : 转动速度会改变线激光器的电机转动速度,进而改变线激光的扫描速度。
其他条件不变,转动速度不同点云效果对比如下:
| 转动速度 30 | 转动速度 60 | 转动速度 90 |
|---|---|---|
 |
 |
 |
¶ 3D参数: 触发频率
- 参数说明 : 触发频率会改变硬件触发采图的频率,使重建点云稠密/稀疏。
- 参数索引 : 3dParameters.triggerFrequency
- 可见级别 : 初级、专家、大师
- 调节说明 : 调整采图触发频率,触发频率调大,则会提高相机帧率,使点云稠密;触发频率调小,则会降低相机帧率,使点云稀疏。
其他条件不变,触发频率不同点云效果对比如下:
| 触发频率 20 | 触发频率 30 |
|---|---|
 |
 |
¶ 3D参数: 左右角度
- 参数说明 : 左/右角度会改变激光器的电机转动角度,进而改变线激光的扫描范围。
- 参数索引 : 3dParameters.leftAngle / 3dParameters.rightAngle
- 可见级别 : 初级、专家、大师
- 调节说明 : 如果被测物体占据视野较大可适当将扫描角度调大;如果被测物体占据视野较小可适当将扫描角度调小,可以节省节拍。
其他条件不变,转动左右角度不同点云效果对比如下:
| 左角度 30 右角度 30 | 左角度 10 右角度 30 | 左角度 30 右角度 10 |
|---|---|---|
 |
 |
 |
¶ 3D参数: 激光阈值
- 参数说明 : A系列设备的 3D 点云重建质量取决于采集的每帧图像内激光线的中心线提取精度,激光阈值会调节中心线提取的质量。
- 参数索引 : 3dParameters.laserThreshold
- 可见级别 : 专家、大师
- 调节说明 : 设定激光阈值后,低于该阈值的像素将不参与激光中心线提取。
¶ 3D参数: 激光宽度
- 参数说明 : A 系列设备的 3D 点云重建质量取决于采集的每帧图像内激光线的中心线提取精度,激光宽度会调节中心线提取的质量。
- 参数索引 : 3dParameters.laserLineWidth
- 可见级别 : 专家、大师
- 调节说明 : 激光宽度会改变激光中心线提取时的像素宽度。
¶ 3D参数: 激光线提取模式
- 参数说明 : 提供不同的提取模式以应用于不同的需求。
- 参数索引 : 3dParameters.laserLineExtractStrategy
- 可见级别 : 专家、大师
- 调节说明 : 提取模式分为 FAST 和 STABLY 两种;FAST 模式的提取速度较快,可应用于性能较低的工控机上避免丢帧;STABLY 模式在提取时应用了更多优化算法,保证激光线中心提取更为精确。
¶ 3D参数: 点云平滑强度
- 参数说明 : 对点云做平滑处理。
- 参数索引 : 3dParameters.laserLineSmoothIntensity
- 可见级别 : 专家、大师
- 调节说明 : 平滑强度对应下拉菜单有四个选项,分别为 OFF、LOW、MEDIUM、HIGH;OFF 为不对点云做平滑处理;LOW、MEDIUM、HIGH 依次为点云平滑效果由弱到强。
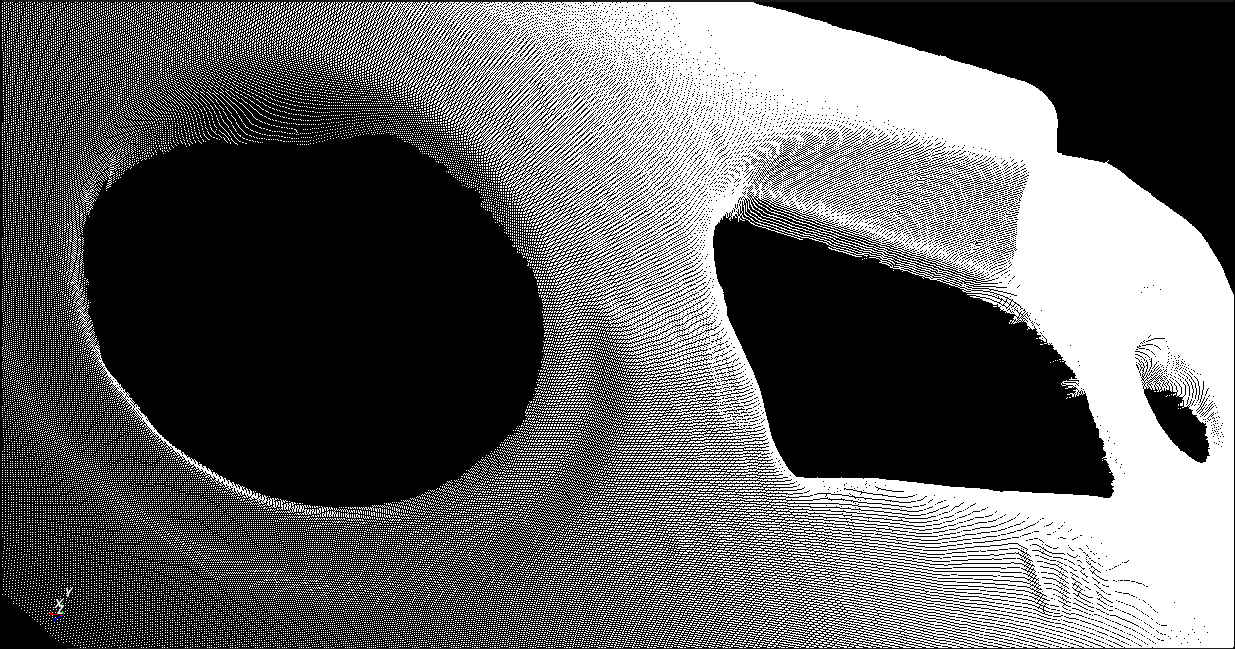
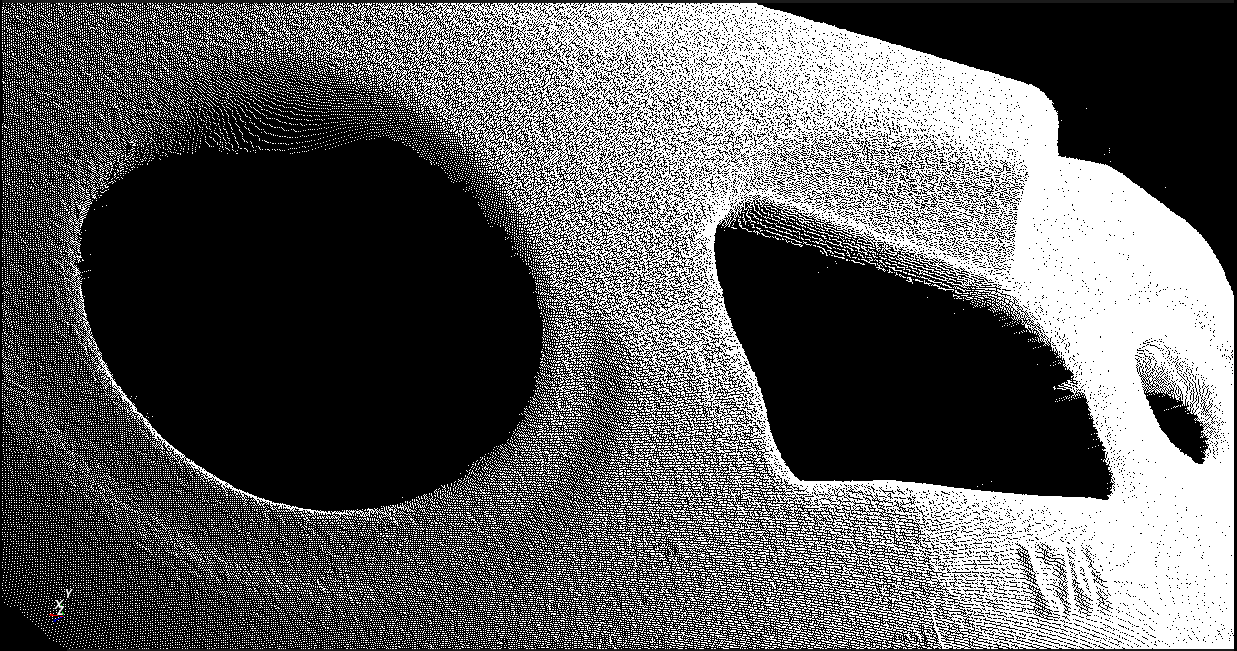
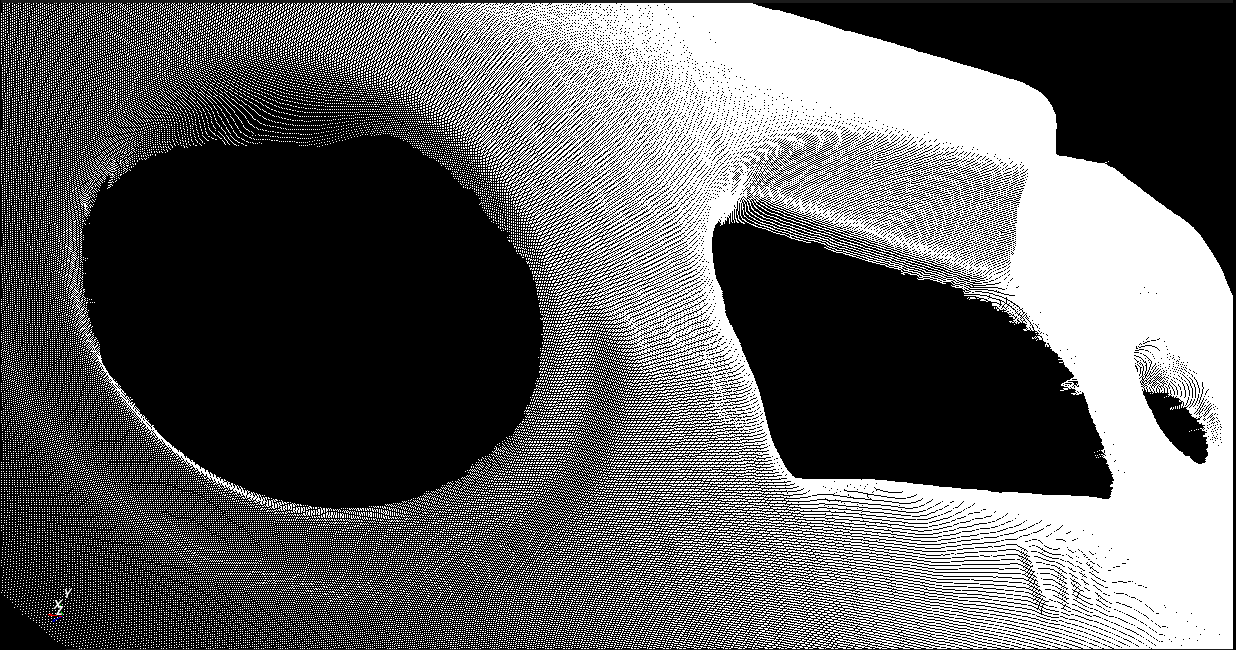
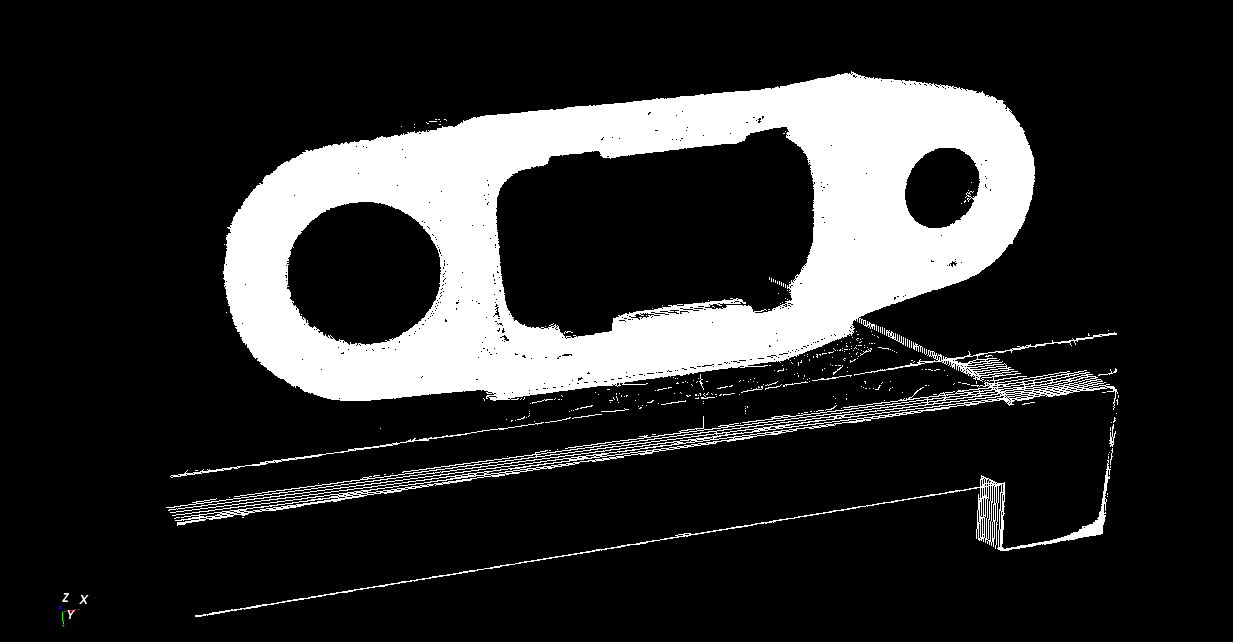
¶ 3D参数: 左/右相机ROI
- 参数说明 : 该参数可供用户调节点云采集区域,仅生成左右相机划定的 ROI 共有区域内的点云。
- 参数索引 : 3dParameters.leftRoiArray / 3dParameters.rightRoiArray
- 可见级别 : 专家、大师
- 调节说明 : 若用户划定了多组 ROI,则生成的点云取决于左右相机 ROI 的公共区域,最多支持5组 ROI,常见情况为框选左相机 ROI 即可,若框选单个相机 ROI 无法满足需求,如工件外形复杂,单个相机 ROI 无法有效去除多余点云,则可对两个相机同时划定 ROI 再生成点云。
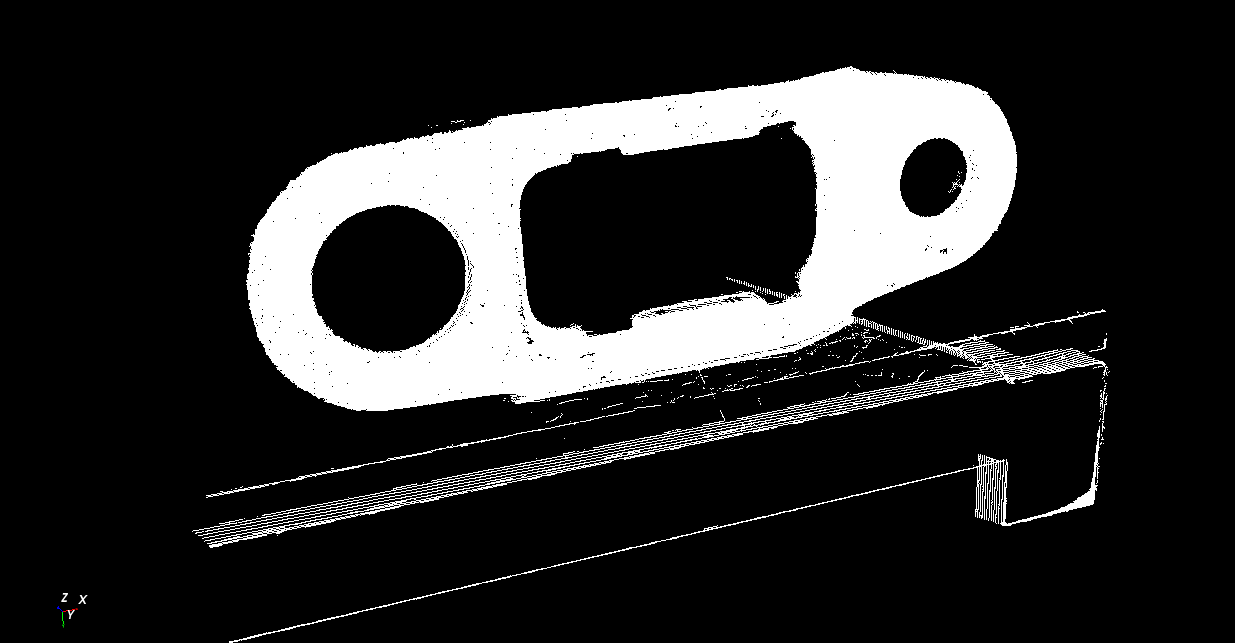
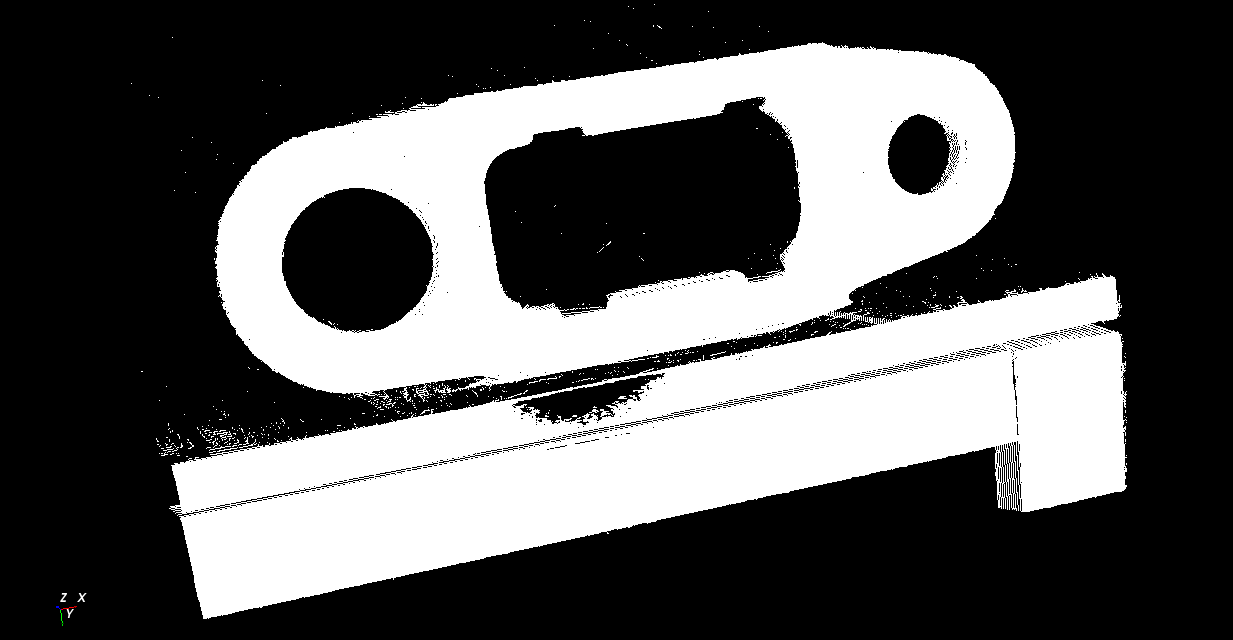
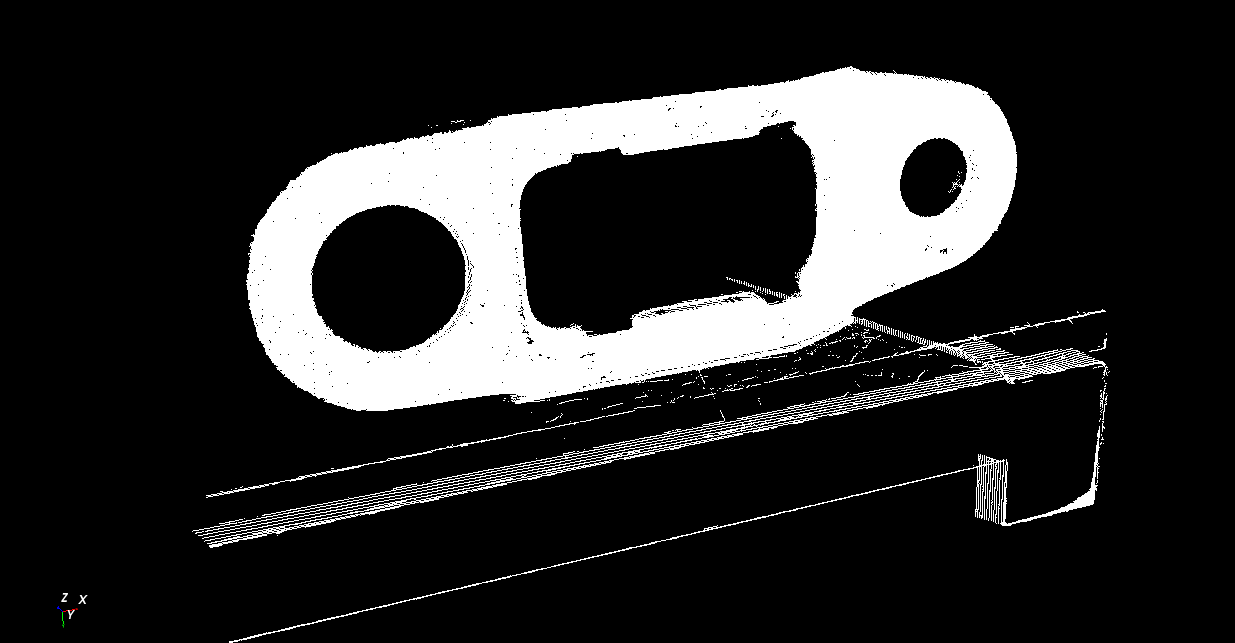
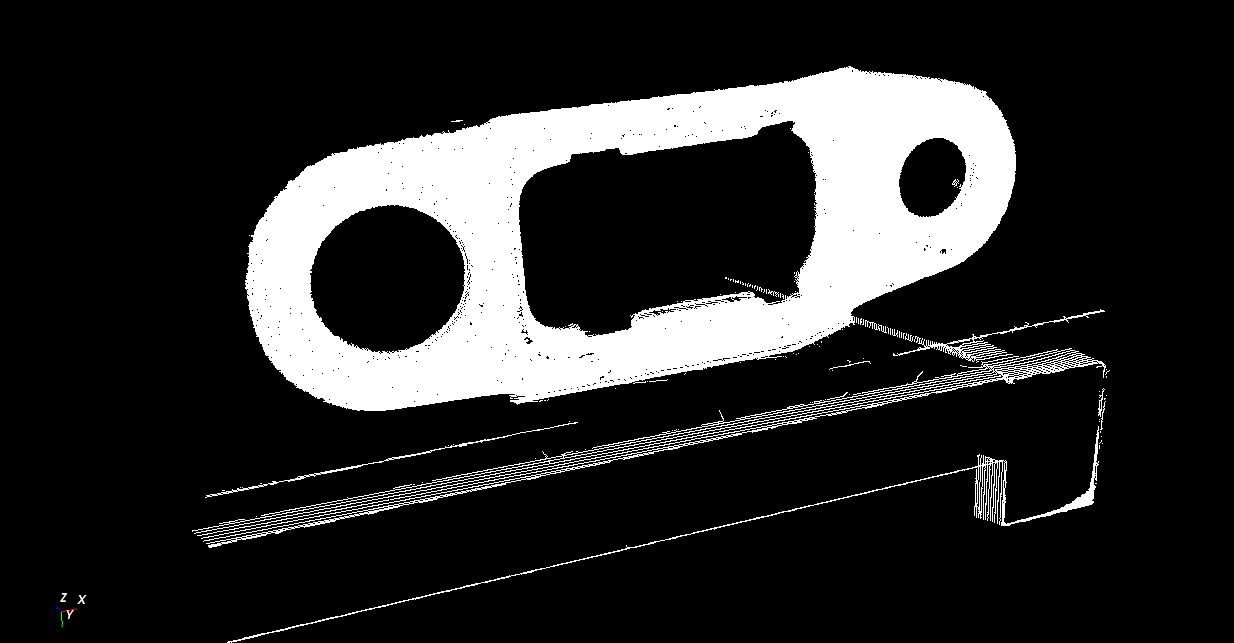
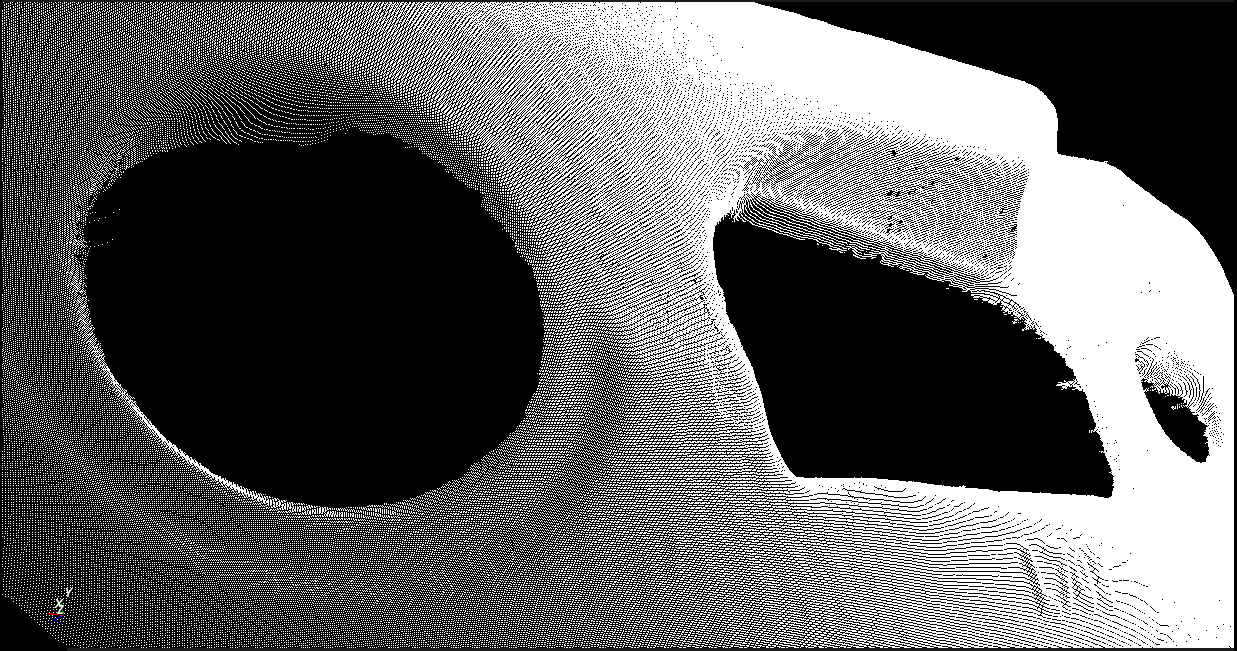
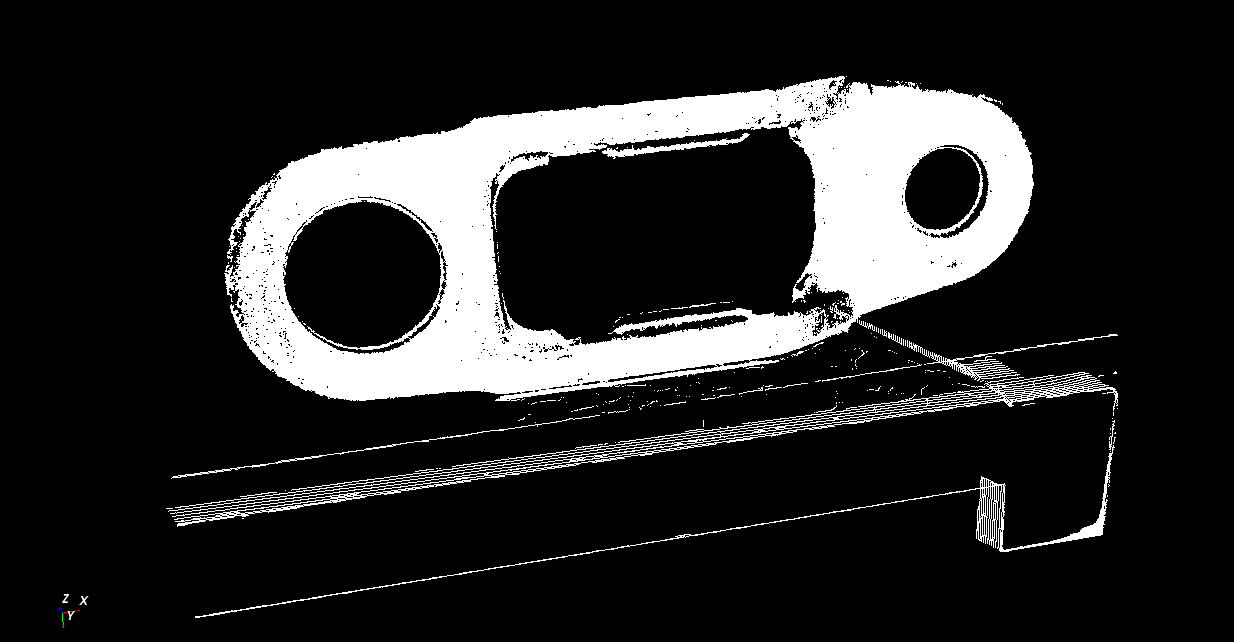
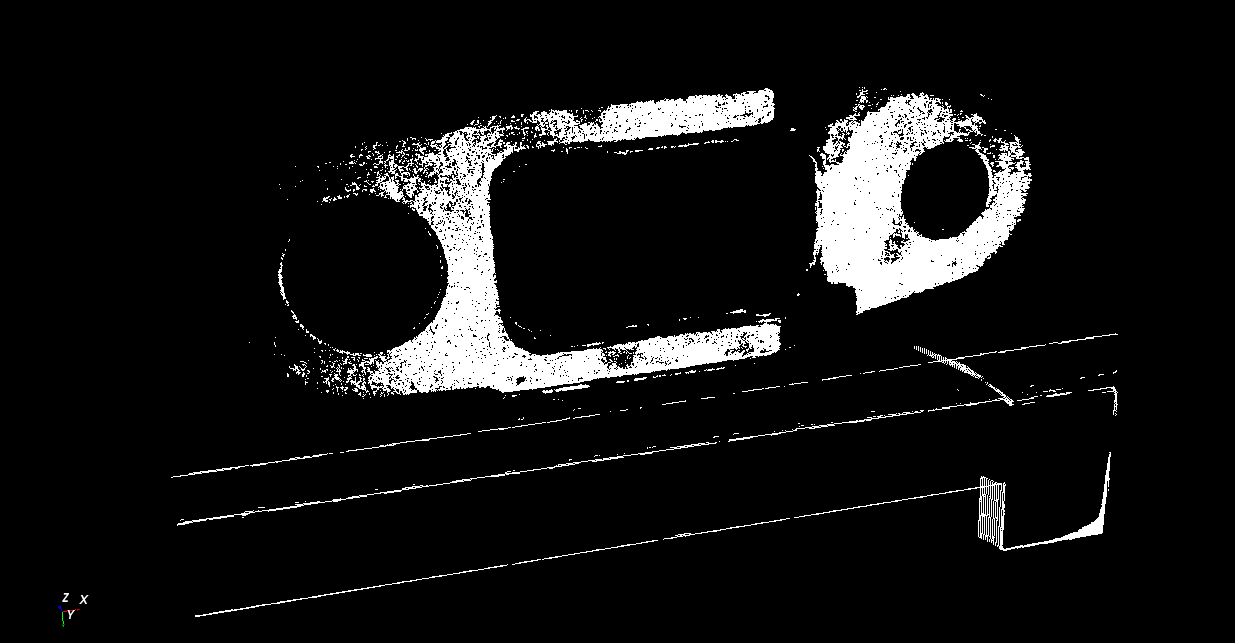
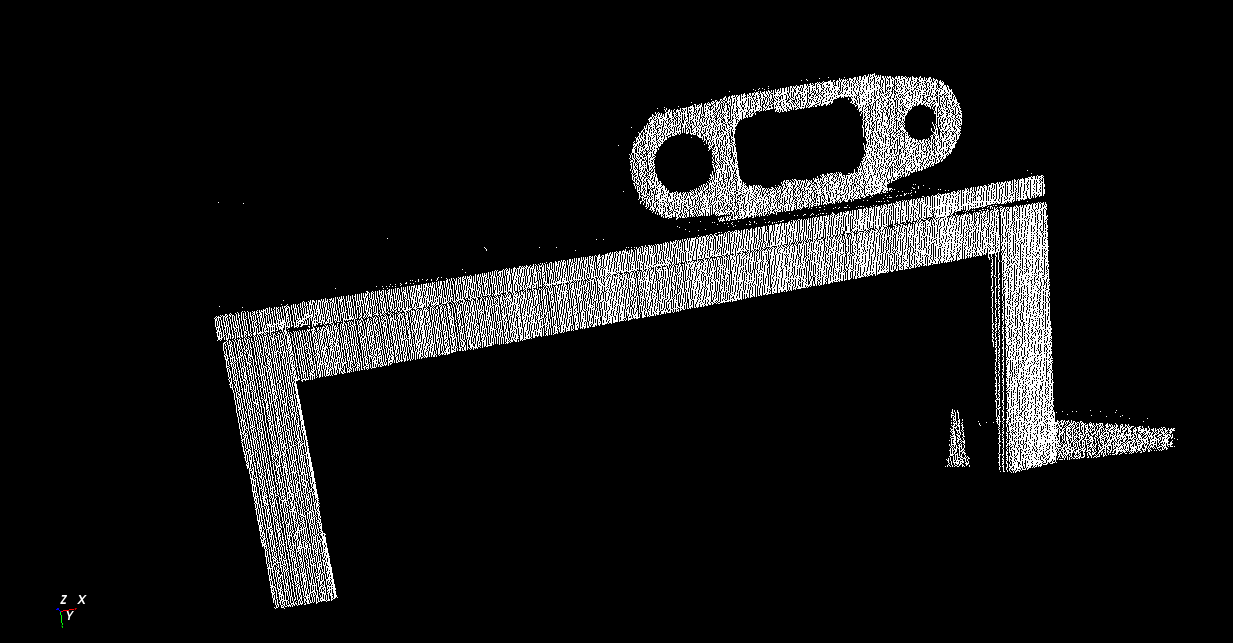
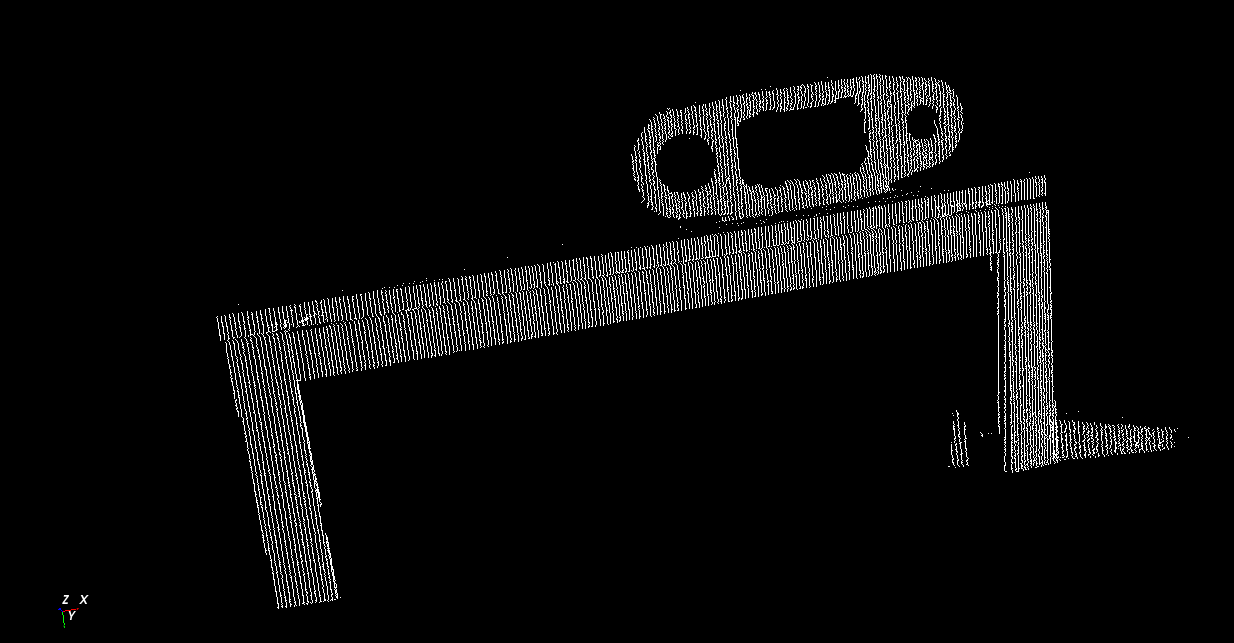
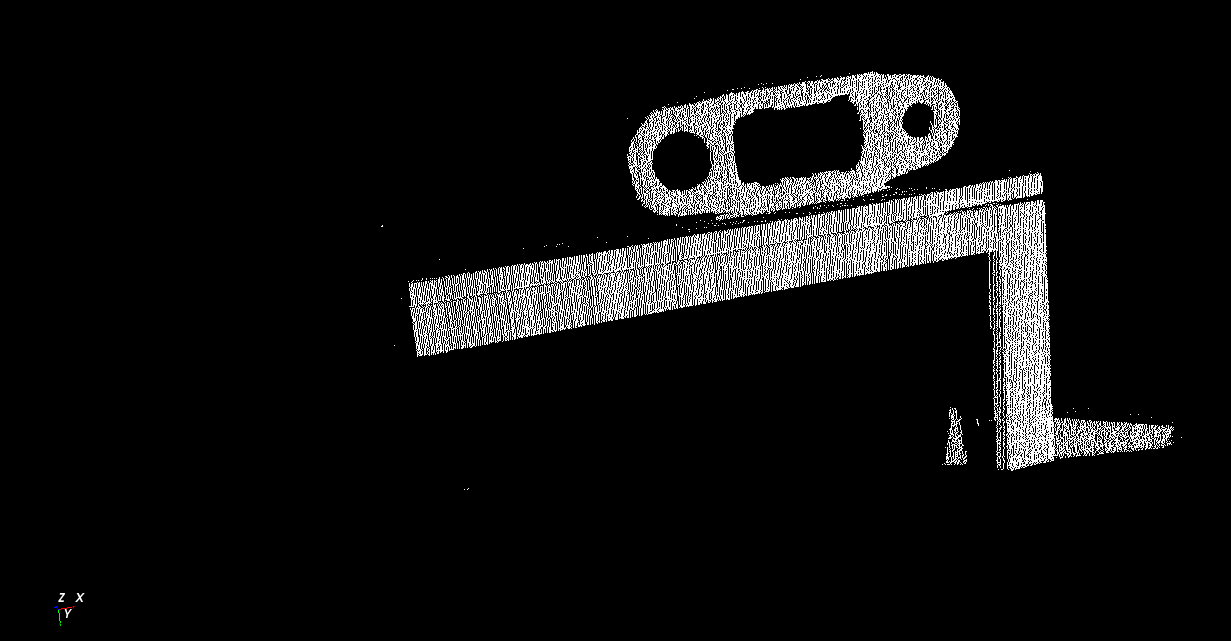
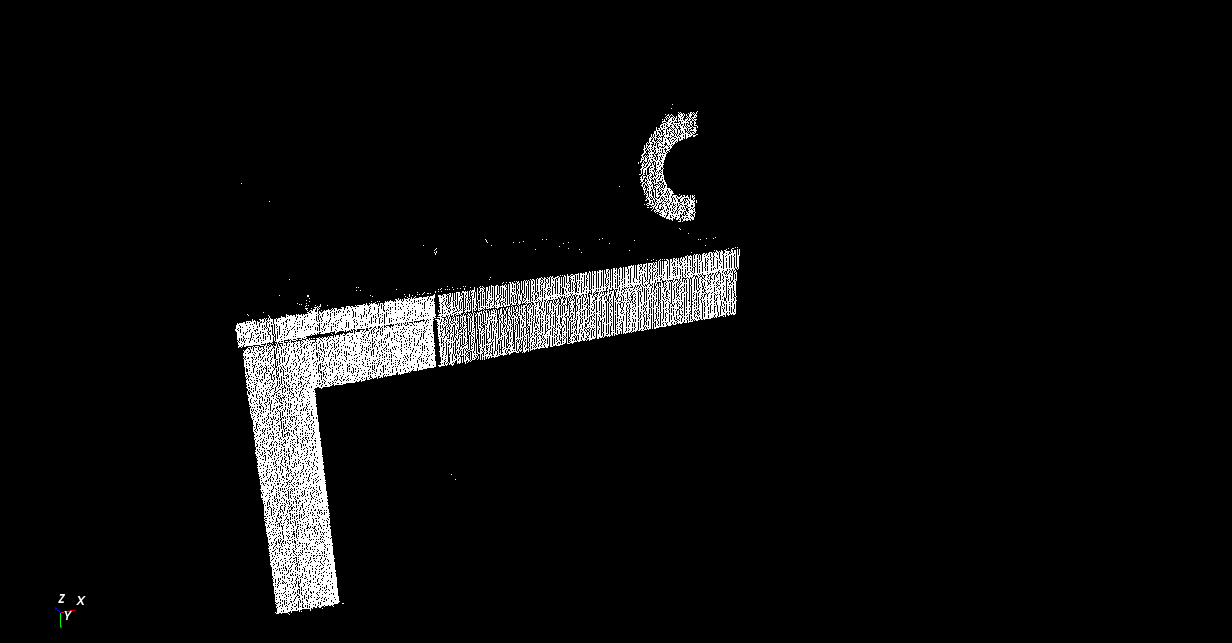
其他条件不变,更改 ROI 前后点云效果对比如下:
| 全局ROI 图像/点云 | 局部ROI 图像/点云 |
|---|---|
 |
 |
 |
 |
对于存在受到周围环境影响导致工件点云缺失可框选 3D ROI 解决点云缺失问题。
¶ 3D参数: 深度测量范围
- 参数说明 : 设定采集 3D 点云的深度区间。
- 参数索引 : 3dParameters.depthRange
- 可见级别 : 专家、大师
- 调节说明 : 初始默认值为设备最佳工作距离范围,上限为设备的最远工作距离,下限为设备的最近工作距离。用户可根据需要进行调节。
¶ 调试参数: 采样间隔
- 参数说明 : 固定曝光模式,采图时曝光时间不会发生变动。
- 参数索引 : debugParameters.samplingInterval
- 可见级别 : 大师
- 调节说明 : 该功能同生成激光线融合图像相关,采样间隔越小激光线越密。
其他条件不变,设置不同采样间隔激光线融合图像效果对比如下:
| 采样间隔 5 | 采样间隔 10 | 采样间隔 15 |
|---|---|---|
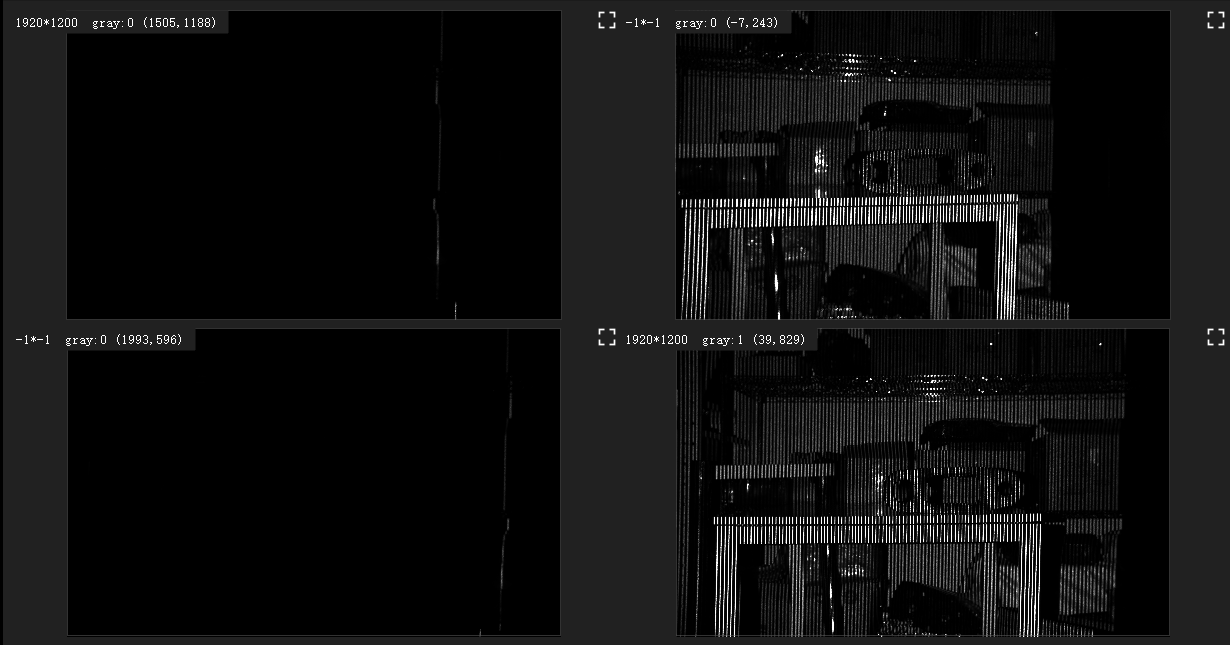 |
 |
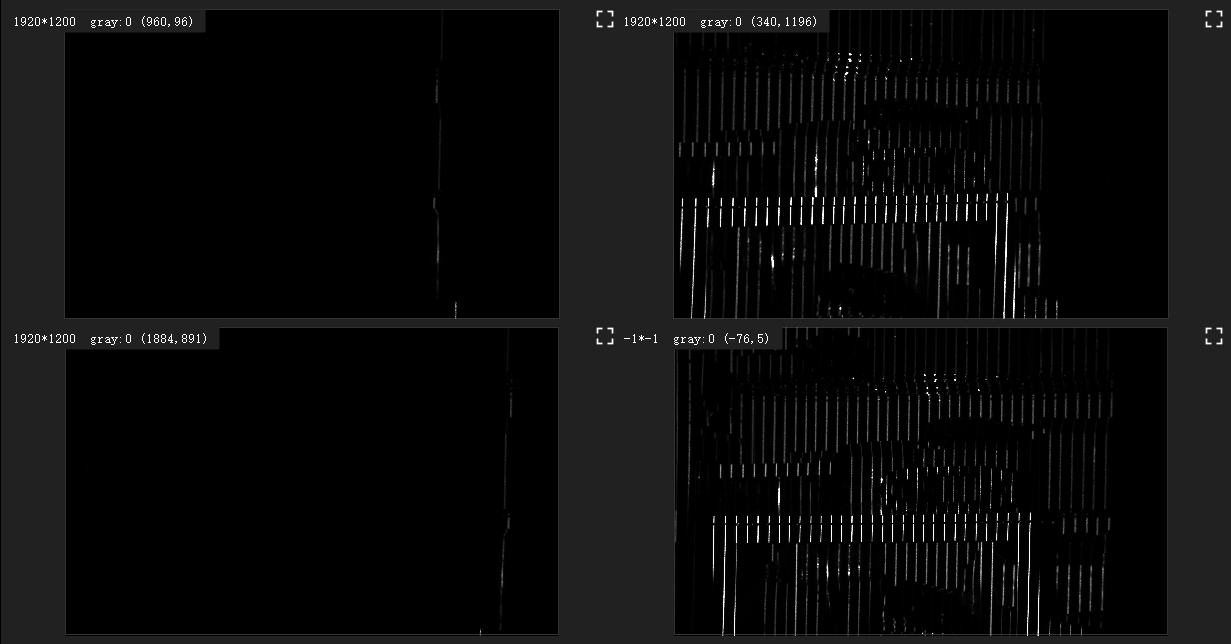 |
该功能仅作用于激光线融合的 2D 图像,便于通过原始激光线数据观察影响点云质量因素,对 3D 点云采集无影响。
¶ 调试参数: 激光线采样
- 参数说明 : 开启后将会生成激光线融合图像。
- 参数索引 : debugParameters.laserLineSampleMode
- 可见级别 : 大师
- 调节说明 : 开启激光线采样后,激光线融合控件会显示左/右相机开始扫描的第一张图像及左/右相机扫描时线激光的融合图像。
如果工控机性能较差,开启该功能会导致扫描时出现丢帧情况,注意根据实际情况开启。
¶ 光机控制参数: 光机唤醒策略
- 参数说明 : 光机唤醒策略分为主动唤醒和被动唤醒,主动唤醒使用额外的一次投图唤醒光机,点云质量更稳定;被动唤醒在扫描过程中唤醒光机,节约时间,速度更快。
- 参数索引 : dlpControlParameters.wakeUpStrategy
- 可见级别 : 大师
- 调节说明 : 如果用户对节拍要求比较严格,可以将光机唤醒策略修改成被动唤醒。
部分设备将光机唤醒策略修改成被动唤醒会影响点云质量,设置前请和我司人员沟通,谨慎使用。
¶ 光机控制参数: 休眠延时
- 参数说明 : 设置光机休眠延时时间,超过该时间光机不工作执行休眠逻辑。
- 参数索引 : dlpControlParameters.sleepDelay
- 可见级别 : 大师
- 调节说明 : 对于节拍要求较高的现场可适当将休眠延时设置大点,不用频繁唤醒光机增加节拍;否则可将休眠延时适当设置小点,用于保护光机。
¶ 2D相机控制参数: 数据包大小
- 参数说明 : 用来设定相机在传输图像数据时的数据包大小,它影响着图像数据的传输效率。
- 参数索引 : cameraParameters.packetSize
- 可见级别 : 大师
- 调节说明 : 正常使用默认值即可,非必要不修改,如需修改,可联系我司人员协助。
只有网口相机才可设置该参数。
¶ 2D相机控制参数: 帧间延时
- 参数说明 : 所选数据流通道上的每个数据包的传输之间的延迟。
- 参数索引 : cameraParameters.interPacketDelay
- 可见级别 : 大师
- 调节说明 : 正常使用默认值即可,非必要不修改,如需修改,可联系我司人员协助。
只有 basler 网口相机才可设置该参数。