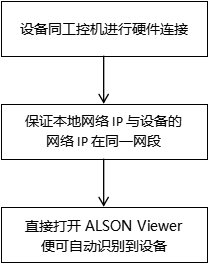
¶ 嵌入式设备连接流程
针对嵌入式设备,用户在完成设备同工控机的硬件连接后,仅需配置网络IP,随后即可打开ALSON Viewer连接设备并使用。
¶ 配置需求
ALSON Viewer 对电脑的基本配置需求如下表所示。
| 最低配置 | 推荐配置 | |
|---|---|---|
| 操作系统 | Windows 10/11 64-bit | Windows 10/11 64-bit |
| 处理器 | Intel Core i5-6500 | Intel Core i7-6700 |
| 内存 | 8GB | 16GB |
| 磁盘 | 200GB | 200GB |
如果您需要与机器人进行通信,请确保在正确连接设备之后,还有一个额外的网口。
嵌入式相机对接口配置需求不高,只需要通过一个网口与电脑连接即可使用。但为了达到最佳的使用体验,请优先使用千兆网口连接。
¶ 硬件连接
嵌入式设备 开箱及安装指导
¶ IP配置
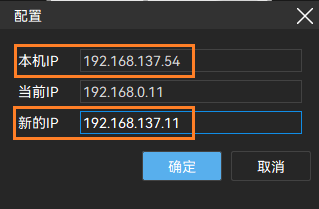
初次连接时,建议直连工控机并打开Alson Viewer软件,设备列表通常会自动刷新显示;若未显示设备,请点击 按钮手动刷新;对于嵌入式的设备,当设备IP与本机IP不在同一网段时,设备列表中可以正常显示该设备,但为不可连接状态。
按钮手动刷新;对于嵌入式的设备,当设备IP与本机IP不在同一网段时,设备列表中可以正常显示该设备,但为不可连接状态。
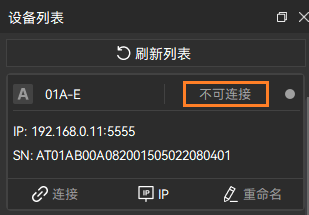
此时,需要点击 按钮,修改新的IP与本机IP在同一网段即可。
按钮,修改新的IP与本机IP在同一网段即可。
¶ 连接设备
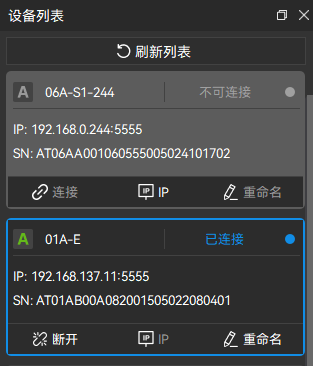
IP配置完毕后,与非嵌入式设备不同的是嵌入式设备不需要配置驱动和相机文件、也不需要启动Alson Device服务端,直接打开ALSON Viewer便可自动识别到设备,点击 按钮,当相机状态标志由绿变蓝,即表示设备连接成功。
按钮,当相机状态标志由绿变蓝,即表示设备连接成功。
¶ 参数设置与数据采集
¶ 参数设置
扫描前用户可以选择一面白墙或者非反光工件作为扫描对象,并将其放置于设备扫描范围内,利用参数组中的默认参数,点击“单次扫描”后,可以采集到2D图像和3D点云。
若采集的2D图像与3D点云质量未达预期,可采用以下方法进行优化调整:
- 2D图像优化
调整参数组中的曝光模式及相关参数。调整曝光参数时,使用实时图像模式可看出明显效果。
固定曝光模式下,曝光时间影响亮度。曝光时间越大,亮度越高;曝光时间越小,亮度越低。
- 3D点云优化
调整参数栏中曝光时间,只有单次扫描后才可以看到工件点云。使用多重曝光时间组合,可获得质量更佳的3D点云。
如果通过微调获取到的2D图像和3D点云仍不满意,可联系我司工作人员进行技术支持。
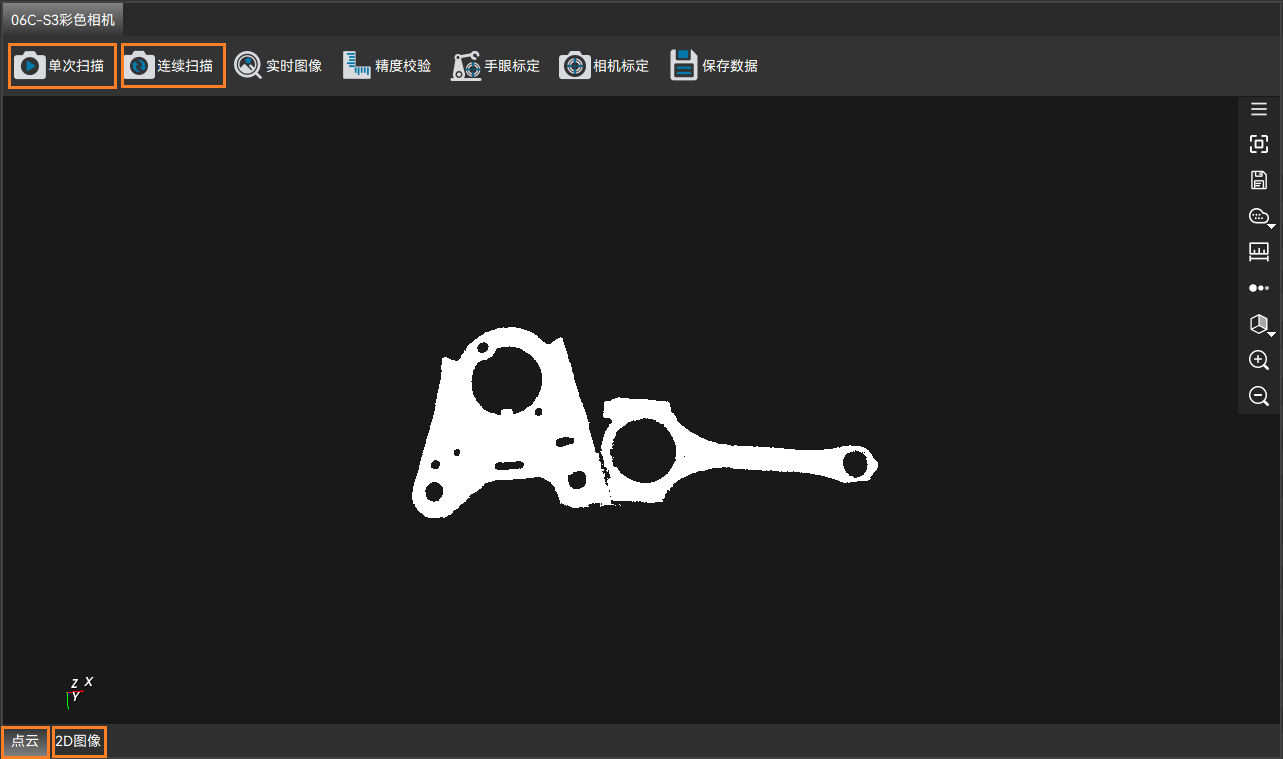
¶ 数据采集
参数设置成功后,点击“单次扫描”或“连续扫描”,在左下角可切换点云、2D图像。